В этом примере показано, как обработать и извлечь функции из сегментированных данных, которые содержат доказательство ухудшающегося отказа вала, и как выполнить предвещающий рейтинг, чтобы определить, какие функции являются лучшими для определения остающегося срока полезного использования (RUL). Разработка комплекта RUL основана на данных запуска к отказу, а не условно сгруппированных данных.
Пример принимает, что вы уже знакомы с основными операциями с приложением. Для примера при использовании приложения смотрите, Идентифицируют Индикаторы состояния для Прогнозирующего Проекта Алгоритма Обслуживания.
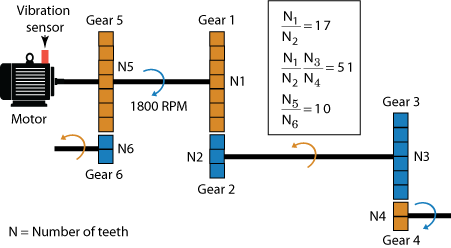
Следующая фигура иллюстрирует ходовую часть с шестью механизмами. Двигатель для ходовой части оснащен датчиком вибрации. Ходовая часть не имеет никакого тахометра. Электроприводы постоянная скорость вращения 1 800 об/мин без изменения. В этой ходовой части:
Механизм 1 на вале двигателя сцепляется с механизмом 2 с передаточным отношением 17:1.
Итоговое передаточное отношение или отношение между механизмами 1 и 2 и механизмами 3 и 4, 51:1.
Механизм 5, также на вале двигателя, сцепляется с механизмом 6 с передаточным отношением 10:1.
Десять симулированных машин используют эту ходовую часть. Все машины имеют разработку отказа на вале механизма 6. Этот отказ становится хуже каждый день. Ставка прогрессии отказа фиксируется для каждой машины, но варьируется на множестве машин.
Данные были зарегистрированы в одни 0,21 периода с каждый день в течение 15 дней. Для каждой машины эти ежедневные сегменты хранятся в смежных положениях в одной переменной. Метки времени отражают время записи данных и увеличиваются постоянно. Например, если меткой времени на итоговой выборке дня 1 является tf, и шагом расчета является Ts, то меткой времени на первой выборке дня 2 является tf + Ts.
Чтобы запуститься, загрузите данные в свою рабочую область MATLAB® и откройте Diagnostic Feature Designer.
load(fullfile(matlabroot, 'toolbox', 'predmaint', 'predmaintdemos', ... 'motorDrivetrainDiagnosis', 'machineDataRUL3'), 'motor_rul3') diagnosticFeatureDesigner
Импортируйте данные. Для этого во вкладке Feature Designer, выберите Import > Import Multi-Member Ensemble и затем выберите motor_rul3 как ваша переменная ансамбля.

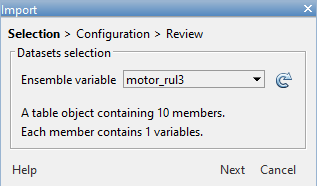
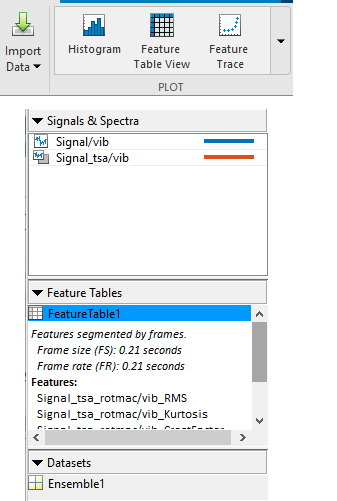
Завершите процесс импорта в последующих диалоговых окнах путем принятия настройки по умолчанию и переменных. Ансамбль состоит из одной переменной данных Signal/vib, который содержит сигнал вибрации. Нет никаких условных переменных.
Просмотрите сигнал вибрации. Для этого в Data Browser, выберите сигнал и постройте его с помощью Signal Trace. Амплитуда сигнала увеличивается постоянно, в то время как дефект прогрессирует.
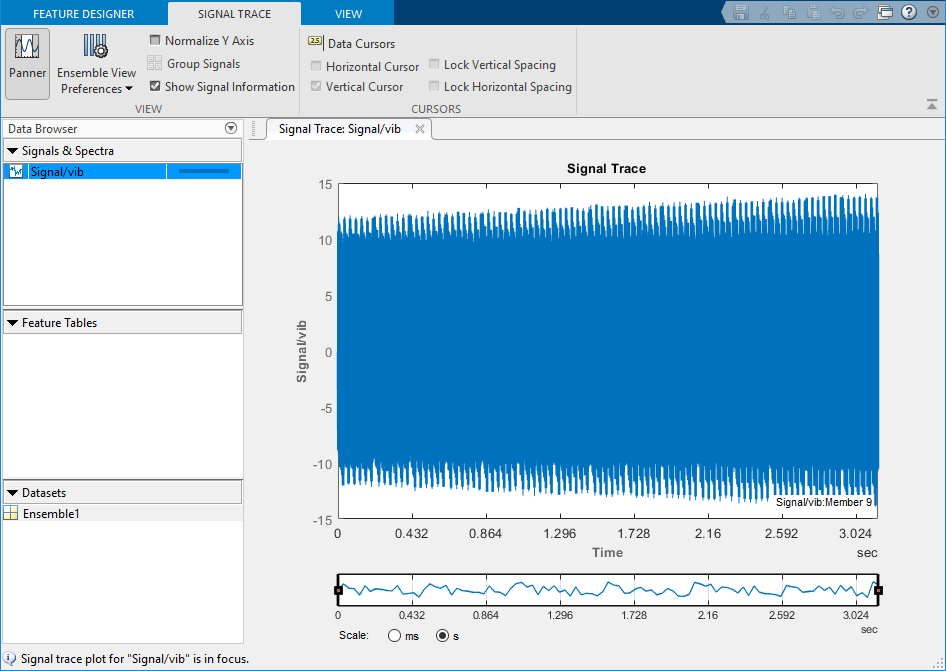
При разработке функций использования RUL вы интересуетесь отслеживанием прогрессии ухудшения, а не в изоляции определенных отказов. История времени полезной функции RUL обеспечивает видимость в скорость деградации, и в конечном счете включает проекцию времени к отказу.
Основанная на системе координат обработка позволяет вам отслеживать прогрессию сегмента ухудшения сегментом. Небольшие или резкие изменения получены в сегменте, что они происходят. Основанные на сегменте функции передают более точную запись ухудшения, чем функции, извлеченные из полного сигнала, могут обеспечить. Для прогноза RUL уровень прогрессии ухудшения так же важен как величина дефекта в установленный срок.
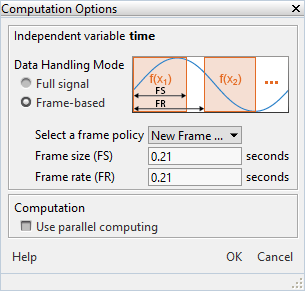
Набор данных для каждой машины в поддержках, сегментированных, обрабатывая путем обеспечения сегмента данных в течение каждого дня. Задайте основанную на системе координат обработку так, чтобы каждый из этих сегментов был обработан отдельно. Поскольку данные были собраны в 0,21 сегментах с, разделите данные для обработки в 0,21 системы координат с.
Нажмите Computation Options. В диалоговом окне, набор Data Handling Mode к Frame-based. Сегменты данных непрерывны, таким образом установите и формат кадра и частоту кадров к 0.21 секунды.
Синхронное во времени усреднение (TSA) составляет в среднем сигнал по одному вращению, существенно уменьшая шум, который не является когерентным с вращением. Отфильтрованные TSA сигналы обеспечивают основание для большого анализа вращательного машинного оборудования, включая генерацию функции.
В этом примере скорость вращения фиксируется к тому же значению на 1 800 об/мин для каждой машины.
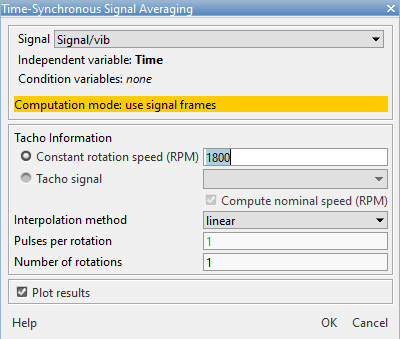
Чтобы вычислить сигнал TSA, выберите Filtering & Averaging > Time-Synchronous Signal Averaging. В диалоговом окне:
Подтвердите выбор в Signal.
В Tacho Information выберите Constant rotation speed (RPM) и установите значение к 1800.
Примите все другие настройки.
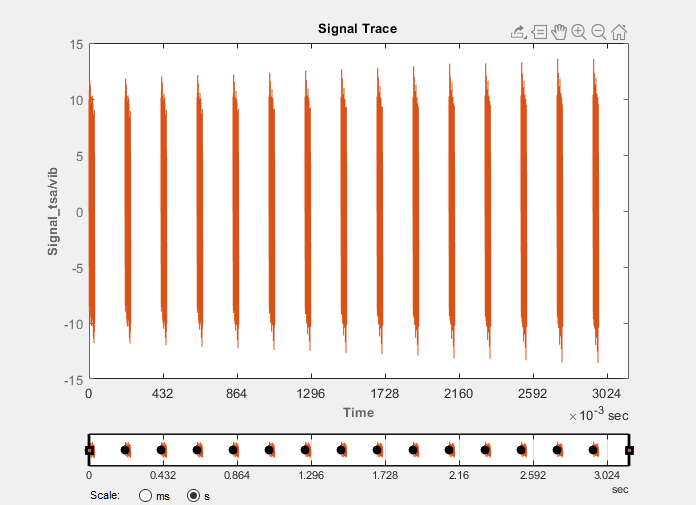
Приложение вычисляет сигнал TSA для каждого сегмента отдельно, и значением по умолчанию строит первый сегмент.
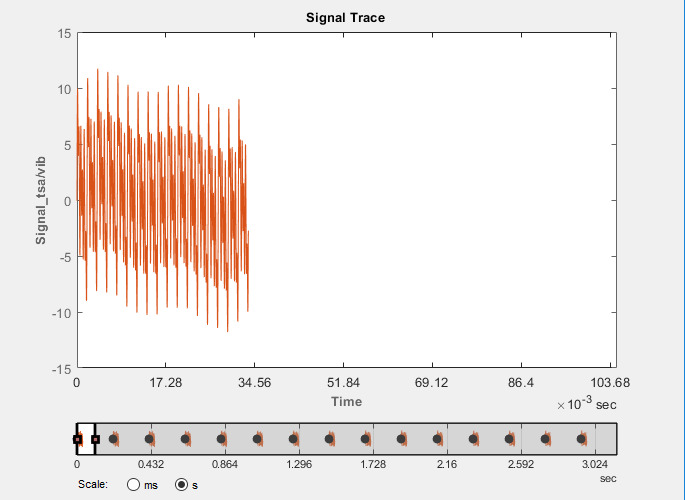
Используйте регулятор панорамы, чтобы расширить график до всех сегментов. График показывает немного увеличивающуюся амплитуду.
Используйте сигнал TSA вычислить временной интервал, вращающий функции машинного оборудования.
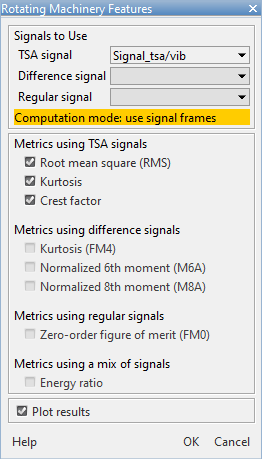
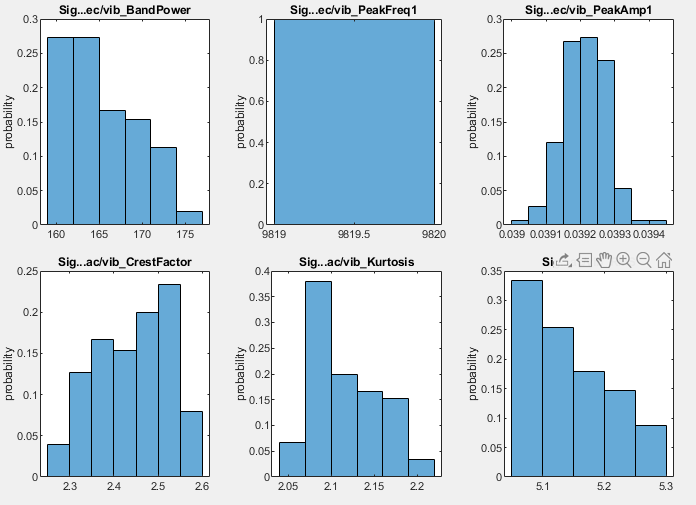
Поскольку у вас нет условных переменных, получившиеся гистограммы отображают только распределение значений функции через сегменты.
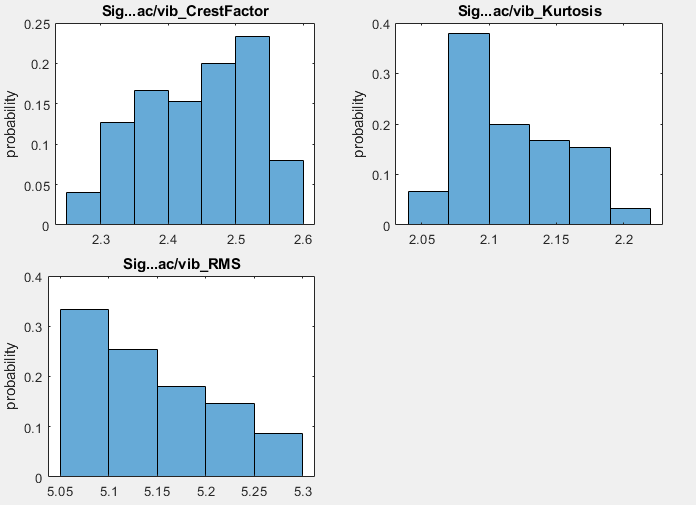
Можно также посмотреть на графики трассировки функции, чтобы видеть, как функции изменяются в зависимости от времени. Для этого в Feature Tables, выберите FeatureTable1. В галерее графика выберите Feature Trace.
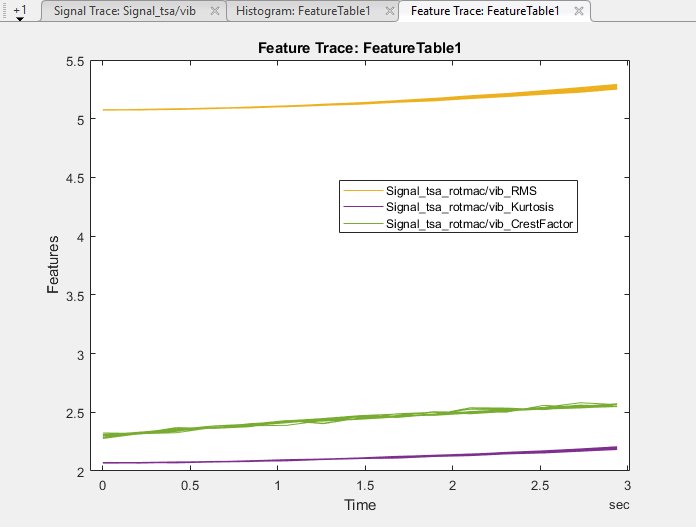
В графике трассировки функции все три функции показывают восходящий наклон, соответствующий продолжающемуся ухудшению. Значения функций друг относительно друга не имеют никакого значения, когда функции представляют различные метрики, которые не нормированы.
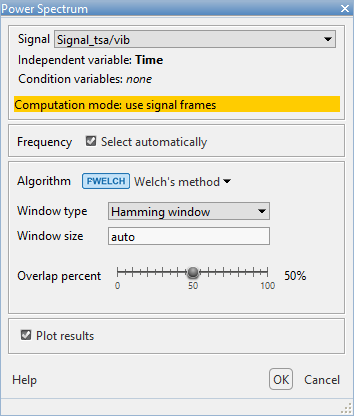
Спектральные функции обычно работают хорошо, когда дефект приводит к периодическому колебанию. Извлеките спектральные функции из своего сигнала TSA. Запустите путем вычисления спектра мощности. Для этого выберите Spectral Estimation > Power Spectrum. Выберите сигнал TSA и измените Algorithm в Welch's method.
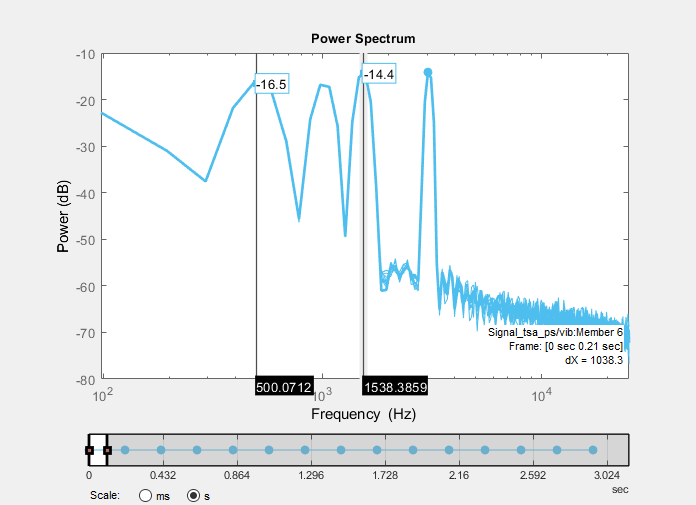
Спектр для первого сегмента включает отличный peaks приблизительно в 500 Гц и 1 540 Гц. Скорость вращения составляет 1 800 об/мин или 30 Гц. Отношения между этими пиковыми частотами - примерно 17 и 51, сопоставимый с передаточными отношениями. Прошедший peaks является дополнительными гармониками тех частот.
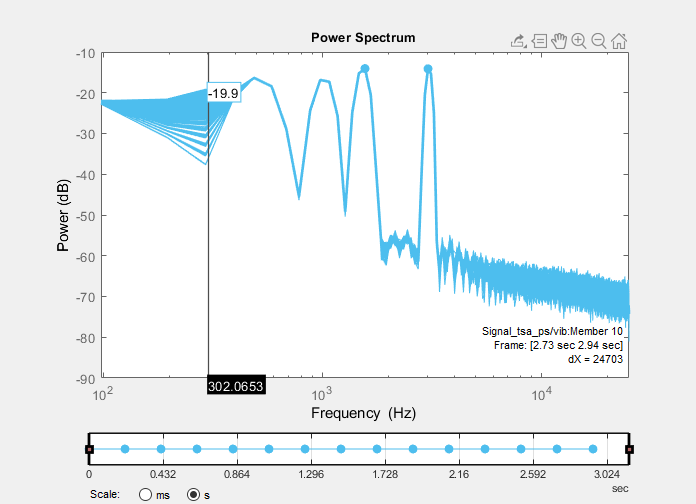
В порядке и частотных диапазонах, наложены спектры сегмента. Регулятор панорамы позволяет вам выбирать несколько сегментов, как он делает во временном интервале. Установите регулятор панорамы покрывать все сегменты. Когда вы расширяете количество сегментов, увеличений степени на уровне 300 Гц. Эта частота соответствует порядку 10 относительно уровня вращения на 30 Гц и представляет увеличивающийся дефект.
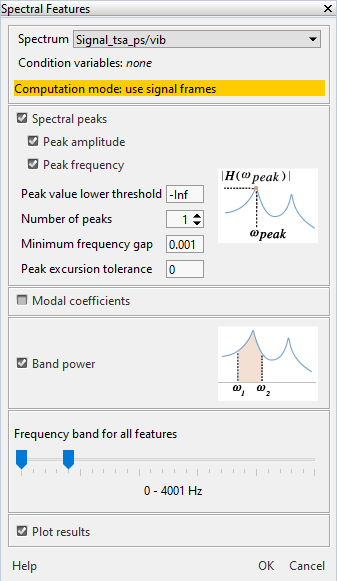
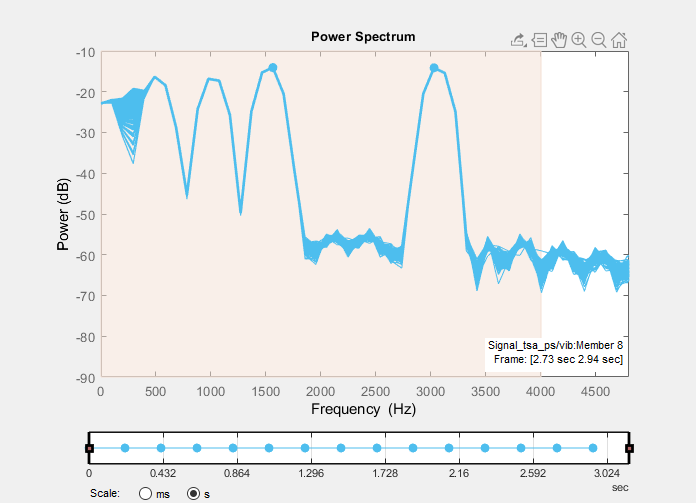
Извлеките спектральные функции. Для этого нажмите Spectral Features и подтвердите, что Spectrum установлен в ваш спектр мощности. Используя ползунок, ограничьте область значений приблизительно 4 000 Гц к связанному область к peaks. График спектра мощности автоматически изменяется от журнала до линейной шкалы и увеличивает масштаб к области значений, которую вы выбираете.
Получившийся график гистограммы теперь включает спектральные функции.
Постройте трассировку функции мощности полосы, чтобы видеть, как она соответствует спектру мощности все-сегмента. Используйте Select Features, чтобы очистить другие трассировки функции.

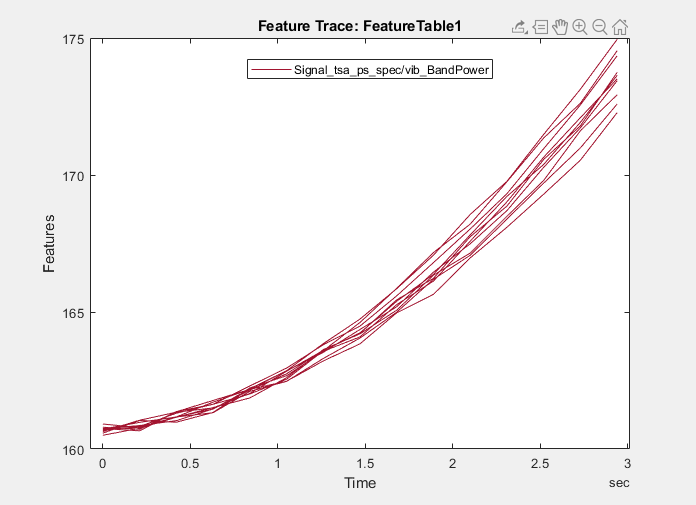
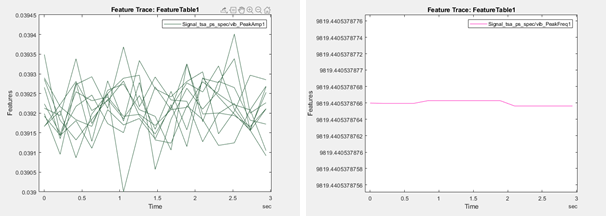
Функция мощности полосы получает прогрессию дефектов в каждой машине. Трассировки других двух спектральных функций не отслеживают дефектную прогрессию.
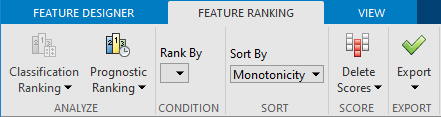
Оцените функции, чтобы видеть, которые выполняют лучше всего для предсказания RUL. Приложение предоставляет три предвещающих метода рейтинга:
Monotonicity характеризует тренд функции, когда система развивается к отказу. Когда система прогрессивно становится ближе к отказу, подходящий индикатор состояния имеет монотонный положительный или отрицательный тренд. Для получения дополнительной информации смотрите monotonicity.
Trendability обеспечивает меру подобия между траекториями функции, измеренной в нескольких экспериментах запуска к отказу. trendability индикатора состояния кандидата задан как самая маленькая абсолютная корреляция между измерениями. Для получения дополнительной информации смотрите trendability.
Prognosability является мерой изменчивости функции при отказе относительно области значений между ее начальными и окончательными значениями. Более prognosable функция имеет меньше изменения при отказе относительно области значений между ее начальными и окончательными значениями. Для получения дополнительной информации смотрите prognosability.
Нажмите Rank Features и выберите FeatureTable1. Поскольку у вас нет условных переменных, значений по умолчанию приложения к предвещающему методу рейтинга Monotonicity.
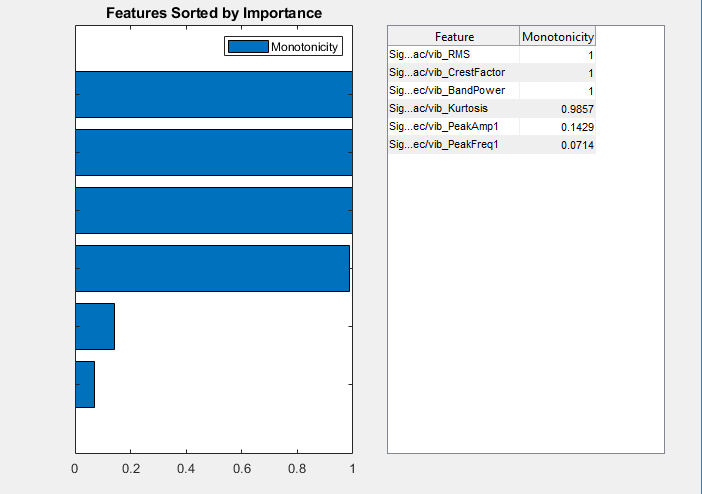
Четыре из функций выигрывают в или близко к максимуму. Две функции, PeakAmp1 и PeakFreq1, имейте значительно более низкие баллы.
Добавьте рейтинги для других двух предвещающих методов. Нажмите Prognostic Ranking и выберите Trendability. Нажмите Apply и затем Close Trendability.

Повторите предыдущий шаг для Prognosability. Занимающий место график теперь содержит результаты всех трех методов рейтинга.
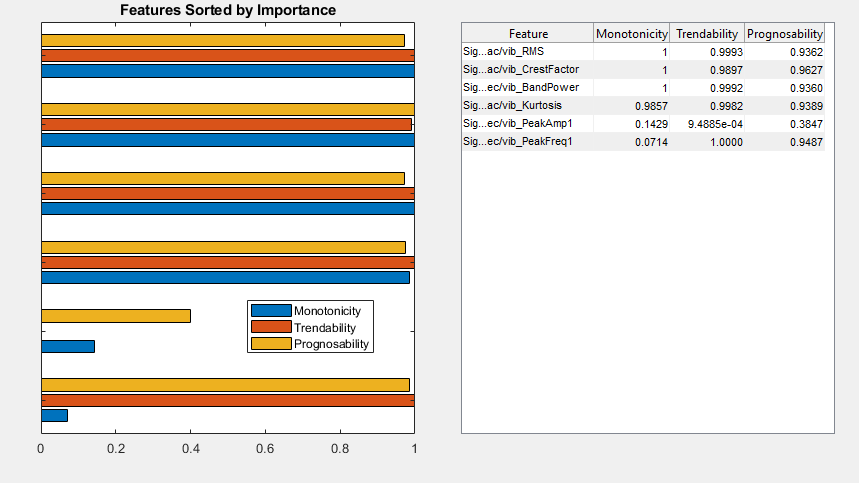
Занимающие место результаты сопоставимы с трассировками функции, построенными в Извлечении Спектральные Функции.
Функции, которые отслеживают ухудшающийся отказ, имеют рекорды для Monotonicity. Эти функции также имеют рекорды для других двух методов.
PeakFreq1, который имеет самый низкий рейтинг Monotonicity выиграйте, имеет рекорды для обоих Trendability и Prognosability. Эти рекорды следуют из близкого соглашения среди траекторий функции и низкой изменчивости в конце симуляции, где отказ является самым большим.
PeakAmp1 имеет низкие баллы для всех рейтингов, отражаясь и нечувствительность этой функции, чтобы дезертировать прогрессия и изменение значений машины для этой функции.
Поскольку у вас есть четыре функции, которые выиграли хорошо во всех категориях, выберите эти функции в качестве набора функций, чтобы продвинуться вперед с в алгоритме RUL.
Diagnostic Feature Designer | monotonicity | prognosability | trendability
