Этот пример проходит процесс создания робота шаг за шагом, показывая вам различные компоненты робота и как функции вызваны, чтобы создать его. Секции кода показывают, но фактические значения для размерностей и преобразований зависят от вашего робота.
Создайте объект твердого тела.
body1 = rigidBody('body1');

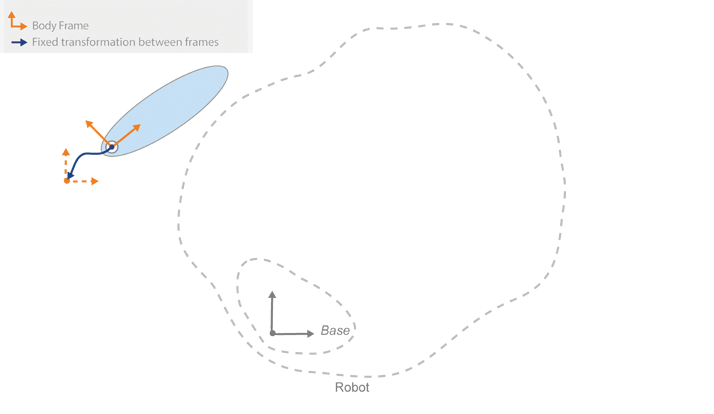
Создайте соединение и присвойте его твердому телу. Задайте свойство исходного положения соединения, HomePosition. Установите соединение к родительскому элементу, преобразовывают использование гомогенного преобразования, tform. Используйте trvec2tform функционируйте, чтобы преобразовать от вектора сдвига до однородного преобразования. ChildToJointTransform установлен в единичную матрицу.
jnt1 = rigidBodyJoint('jnt1','revolute'); jnt1.HomePosition = pi/4; tform = trvec2tform([0.25, 0.25, 0]); % User defined setFixedTransform(jnt1,tform); body1.Joint = jnt1;
![]()
Создайте дерево твердого тела. Это дерево инициализируется с основной координатной системой координат, чтобы присоединить тела к.
robot = rigidBodyTree;
Добавьте первое тело в дерево. Укажите, что вы присоединяете его к основе дерева. Фиксированное преобразование, заданное ранее, от основы (родительский элемент) к первому телу.
addBody(robot,body1,'base')
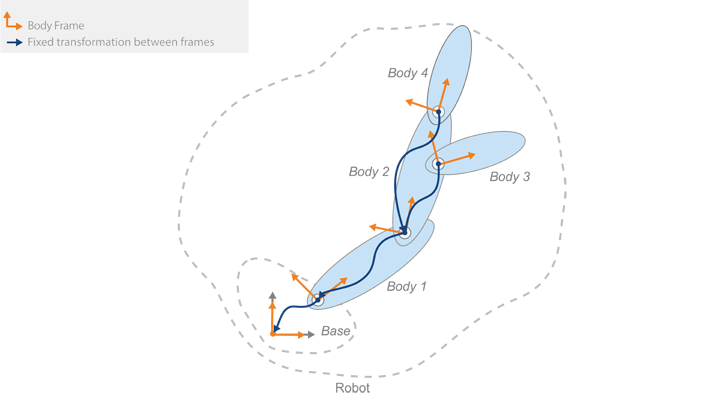
Создайте второе тело. Задайте свойства этого тела и присоедините его к первому твердому телу. Задайте преобразование относительно предыдущей системы координат тела.
body2 = rigidBody('body2'); jnt2 = rigidBodyJoint('jnt2','revolute'); jnt2.HomePosition = pi/6; % User defined tform2 = trvec2tform([1, 0, 0]); % User defined setFixedTransform(jnt2,tform2); body2.Joint = jnt2; addBody(robot,body2,'body1'); % Add body2 to body1

Добавьте другие тела. Присоедините тело 3 и 4, чтобы придать форму 2.
body3 = rigidBody('body3'); body4 = rigidBody('body4'); jnt3 = rigidBodyJoint('jnt3','revolute'); jnt4 = rigidBodyJoint('jnt4','revolute'); tform3 = trvec2tform([0.6, -0.1, 0])*eul2tform([-pi/2, 0, 0]); % User defined tform4 = trvec2tform([1, 0, 0]); % User defined setFixedTransform(jnt3,tform3); setFixedTransform(jnt4,tform4); jnt3.HomePosition = pi/4; % User defined body3.Joint = jnt3 body4.Joint = jnt4 addBody(robot,body3,'body2'); % Add body3 to body2 addBody(robot,body4,'body2'); % Add body4 to body2
Если у вас есть определенный исполнительный элемент конца, о котором вы заботитесь об управлении, задаете его как твердое тело с фиксированным соединением. Для этого робота добавьте исполнительный элемент конца в body4 так, чтобы можно было получить преобразования для него.
bodyEndEffector = rigidBody('endeffector'); tform5 = trvec2tform([0.5, 0, 0]); % User defined setFixedTransform(bodyEndEffector.Joint,tform5); addBody(robot,bodyEndEffector,'body4');
Теперь, когда вы создали своего робота, можно сгенерировать настройки робота. С данной настройкой можно также получить преобразование между двумя системами координат тела с помощью rigidBodyTree.getTransform. Получите преобразование от исполнительного элемента конца до основы.
config = randomConfiguration(robot) tform = getTransform(robot,config,'endeffector','base')
config =
1×2 struct array with fields:
JointName
JointPosition
tform =
-0.5484 0.8362 0 0
-0.8362 -0.5484 0 0
0 0 1.0000 0
0 0 0 1.0000![]()
Это преобразование характерно для размерностей, заданных в этом примере. Значения для вашего робота варьируются в зависимости от преобразований, которые вы задаете.
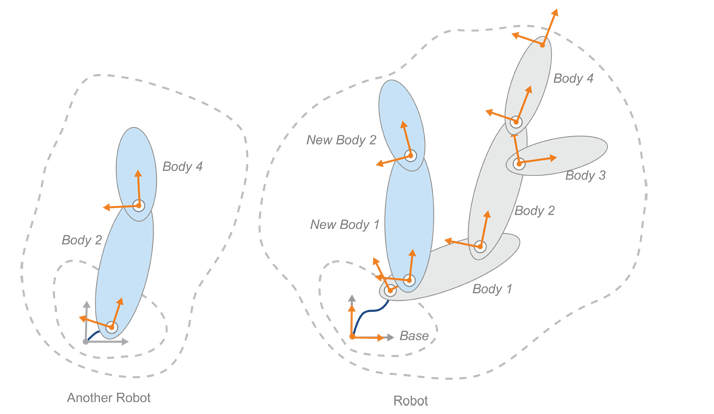
Можно создать поддерево из существующего робота или других моделей робота при помощи subtree. Задайте имя тела, чтобы использовать в качестве основы для нового поддерева. Можно изменить это поддерево путем добавления, изменившись или удалив тела.
newArm = subtree(robot,'body2'); removeBody(newArm,'body3'); removeBody(newArm,'endeffector')

Можно также добавить эти поддеревья в робота. Добавление поддерева похоже на добавление тела. Заданные действия имени тела как основа для прикрепления и все преобразования на поддереве относительно той системы координат тела. Прежде чем вы добавите поддерево, необходимо гарантировать все имена тел, и соединения уникальны. Создайте копии тел и соединений, переименуйте их и замените их на поддереве. Вызовите addSubtree присоединить поддерево к заданному телу.
newBody1 = copy(getBody(newArm,'body2')); newBody2 = copy(getBody(newArm,'body4')); newBody1.Name = 'newBody1'; newBody2.Name = 'newBody2'; newBody1.Joint = rigidBodyJoint('newJnt1','revolute'); newBody2.Joint = rigidBodyJoint('newJnt2','revolute'); tformTree = trvec2tform([0.2, 0, 0]); % User defined setFixedTransform(newBody1,tformTree); replaceBody(newArm,'body2',newBody1); replaceBody(newArm,'body4',newBody2); addSubtree(robot,'body1',newArm);
Наконец, можно использовать showdetails чтобы посмотреть на робота, вы создали. Проверьте, что объединенные типы правильны.
showdetails(robot)
Idx Body Name Joint Name Joint Type Parent Name(Idx) Children Name(s) --- --------- ---------- ---------- ---------------- ---------------- 1 body1 jnt1 revolute base(0) body2(2) newBody1(6) 2 body2 jnt2 revolute body1(1) body3(3) body4(4) 3 body3 jnt3 revolute body2(2) 4 body4 jnt4 revolute body2(2) endeffector(5) 5 endeffector endeffector_jnt fixed body4(4) 6 newBody1 newJnt1 revolute body1(1) newBody2(7) 7 newBody2 newJnt2 revolute newBody1(6) --------------------
inverseKinematics | rigidBodyTree
