Продукт Simulink® обеспечивает , linmodlinmod2, и dlinmod функции, чтобы извлечь линейные модели в форме матриц пространства состояний A, B, C, и D. Матрицы пространства состояний описывают линейное отношение ввода - вывода как
где x, u и y являются состоянием, входом и выходными векторами, соответственно. Например, следующая модель называется lmod.
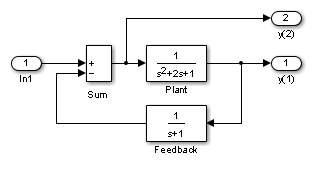
Чтобы извлечь линейную модель этой системы, введите эту команду.
[A,B,C,D] = linmod('lmod')
A =
-2 -1 -1
1 0 0
0 1 -1
B =
1
0
0
C =
0 1 0
0 0 -1
D =
0
1
Вводы и выводы должны быть заданы с помощью Inport и блоков Outport из библиотеки Ports & Subsystems. Источник и блоки приемника не действуют как вводы и выводы. Блоки Inport могут использоваться в сочетании с исходными блоками, с помощью блока Sum. Если данные находятся в форме пространства состояний или преобразованы в объект LTI, можно применить функции в продукте Control System Toolbox™ для последующего анализа:
Преобразование в объект LTI
sys = ss(A,B,C,D);
Предвещайте частотный график величины и фаза
bode(A,B,C,D) or bode(sys)
Линеаризовавший ответ времени
step(A,B,C,D) or step(sys) impulse(A,B,C,D) or impulse(sys) lsim(A,B,C,D,u,t) or lsim(sys,u,t)
Можно использовать другие функции в Control System Toolbox и продуктах Robust Control Toolbox™ для линейного проекта системы управления.
Когда модель нелинейна, рабочая точка может быть выбрана, в котором можно извлечь линеаризовавшую модель. Дополнительные аргументы к linmod задайте рабочую точку.
[A,B,C,D] = linmod('sys', x, u)
Для дискретных систем или смешанных непрерывных и дискретных систем, используйте функциональный dlinmod для линеаризации. Эта функция имеет тот же синтаксис вызова как linmod за исключением того, что второй правый аргумент должен содержать шаг расчета, в котором можно выполнить линеаризацию.
Можно использовать linmod извлекать линейную модель из окружения Simulink, которое содержит блоки Model.
В Режиме normal mode, linmod команда применяет алгоритм линеаризации блока блоком на блоки в модели, на которую ссылаются. Если блок Model находится в Режиме Accelerator, linmod команда использует числовое возмущение, чтобы линеаризовать модель, на которую ссылаются. Из-за ограничений на линеаризацию многоскоростной модели блокируется в Режиме Accelerator, необходимо использовать симуляцию Режима normal mode во всех моделях, на которые ссылаются блоки Model при линеаризации с моделями, на которые ссылаются. Для объяснения алгоритма линеаризации блока блоком см. документацию Simulink Control Design™.
Например, рассмотрите f14 модель mdlref_f14. Блок Model Динамики Самолета обращается к модели mdlref_dynamics.
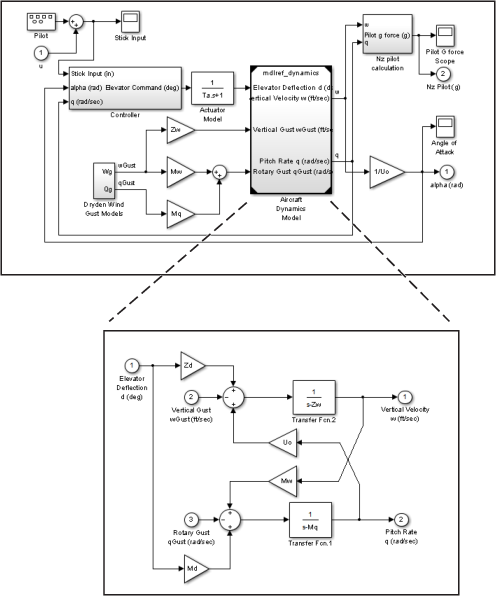
Линеаризовать mdlref_f14 модель, вызовите linmod команда на главном mdlref_f14 модель можно следующим образом.
[A,B,C,D] = linmod('mdlref_f14')Получившаяся модель в пространстве состояний соответствует полному f14 модель, включая модель, на которую ссылаются.
Можно вызвать linmod с состоянием и входной рабочей точкой для моделей, которые содержат блоки Model. При использовании рабочих точек, вектор состояния x относится к общему вектору состояния для топ-модели и любых моделей, на которые ссылаются. Необходимо ввести вектор состояния с помощью формата структуры. Чтобы получить полный вектор состояния, вызвать
x = Simulink.BlockDiagram.getInitialState(topModelName)
Вызов linmod команда с 'v5' аргумент вызывает алгоритм возмущения, созданный до версии 5.3 MATLAB. Этот алгоритм также позволяет вам указывать, что значения возмущения раньше выполняли возмущение всех состояний и входные параметры модели.
[A,B,C,D]=linmod('sys',x,u,para,xpert,upert,'v5')linmod с 'v5' опция, чтобы линеаризовать модель, которая содержит Производные или Транспортные блоки Задержки, может быть неприятной. Перед линеаризацией, замена эти блоки со специально спроектированными блоками, которые избегают проблем. Эти блоки находятся в библиотеке Simulink Extras в подбиблиотеке Linearization.Вы получаете доступ к библиотеке Extras путем открытия значка Blocksets & Toolboxes:
Для блока Derivative используйте Коммутируемую производную в линеаризации.
При использовании блока Derivative можно также попытаться включить производный термин в других блоках. Например, если у вас есть блок Derivative последовательно с блоком Transfer Fcn, это лучше реализовано (несмотря на то, что это не всегда возможно) с одним блоком Transfer Fcn формы
В этом примере блоки слева от этого рисунка могут быть заменены блоком справа.

