В этом примере показано, как спроектировать компенсатор для модели Simulink® использование автоматизированной настройки ПИДа.
Этот пример использует watertank_comp_design Модель Simulink. Открыть модель, в командной строке MATLAB®, введите:
watertank_comp_design
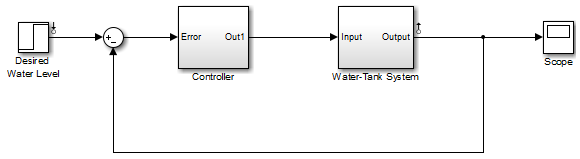
Эта модель содержит модель объекта управления Water-Tank System и ПИД-регулятор в одноконтурной системе с обратной связью.
Чтобы просмотреть модель бака для воды, дважды кликните блок Water-Tank System.
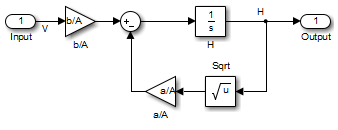
Эта модель представляет следующую систему бака для воды:
где
H является высотой воды в баке.
Vol является объемом воды в баке.
V является напряжением, приложенным к насосу.
A является площадью поперечного сечения бака.
b является константой, связанной со скоростью потока жидкости в бак.
a является константой, связанной со скоростью потока жидкости из бака.
Вода входит, бак от верхней части на уровне, пропорциональном напряжению, применился к насосу. Вода уезжает посредством открытия в основе бака на уровне, который пропорционален квадратному корню из высоты воды в баке. Присутствие квадратного корня в уровне потока воды приводит к нелинейному объекту. На основе этих скоростей потока жидкости скорость изменения объема бака:
Настройте ПИД-регулятор, чтобы соответствовать следующим конструктивным требованиям переходного процесса с обратной связью:
Перерегулирование меньше чем 5%
Время нарастания меньше чем пять секунд
Чтобы открыть Control System Designer, в окне модели Simulink, в галерее Apps, нажимают Control System Designer.
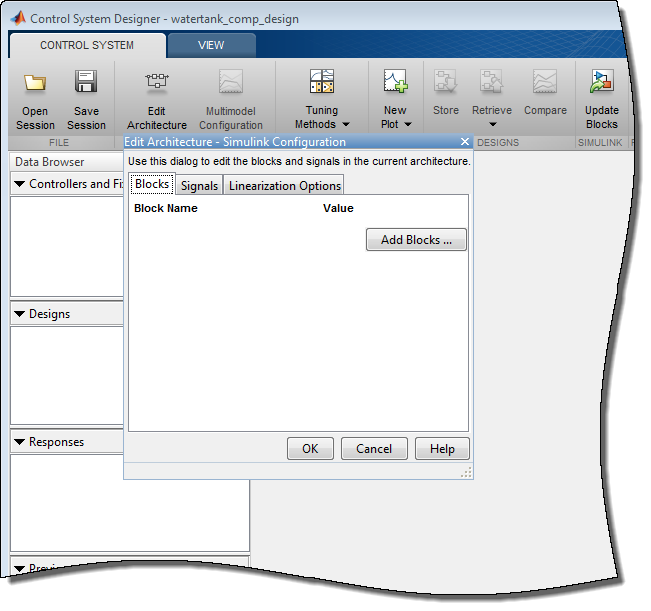
Control System Designer открывает и автоматически открывает диалоговое окно Edit Architecture.
Чтобы задать компенсатор, чтобы настроиться, в диалоговом окне Edit Architecture, нажимают Add Blocks.
В диалоговом окне Select Blocks to Tune, на левой панели, кликают по подсистеме Controller и, на столбце Tune, устанавливают флажок для PID Controller.
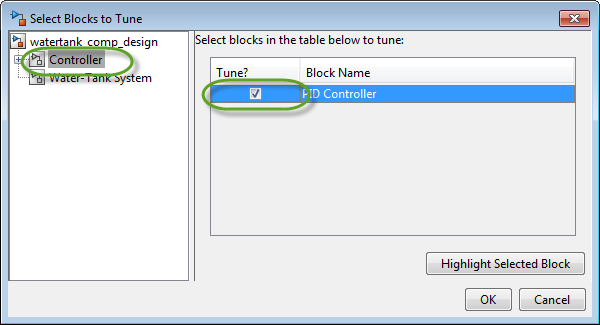
Нажмите OK.
В диалоговом окне Edit Architecture приложение добавляет блок выбранного контроллера в список блоков, чтобы настроиться на вкладке Blocks. На вкладке Signals приложение также добавляет, что выход блока PID Controller к списку анализа указывает Locations.
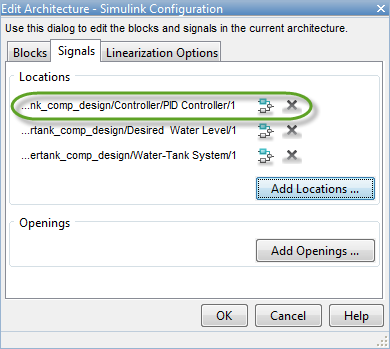
Когда Control System Designer открывается, он добавляет любые аналитические точки, ранее заданные в модели Simulink к списку Locations. Для watertank_comp_design, существует два таких сигнала.
Блок Desired Water Level выход — Ссылочный сигнал для переходного процесса с обратной связью
Блок Water-Tank System выход — Выходной сигнал для переходного процесса с обратной связью
Чтобы линеаризовать модель Simulink и установить архитектуру управления, нажмите OK.
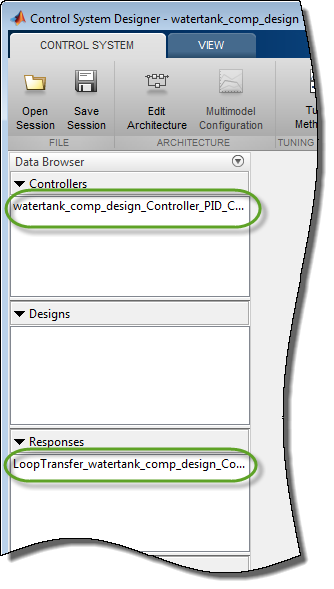
По умолчанию Control System Designer линеаризует модель объекта управления в начальных условиях модели.
Приложение добавляет ПИД-регулятор в Data Browser в области Controllers and Fixed Blocks. Приложение также вычисляет передаточную функцию разомкнутого цикла при выходе блока PID Controller и добавляет этот ответ на Data Browser.
Чтобы анализировать проектирование контроллера, создайте передаточную функцию с обратной связью системы и постройте ее переходной процесс.
На вкладке Control System нажмите New Plot и выберите New Step.
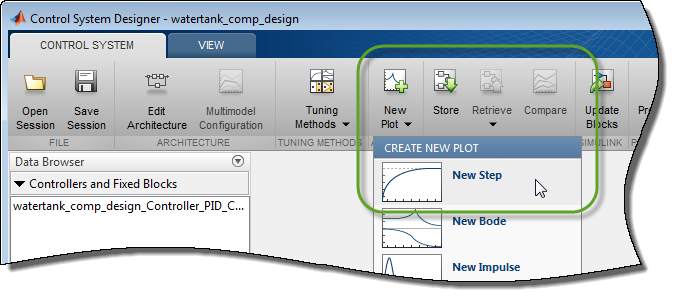
На Новом Шаге, чтобы построить диалоговое окно, на Select Response to Plot выпадающий список, выбирают New Input-Output Transfer Response.
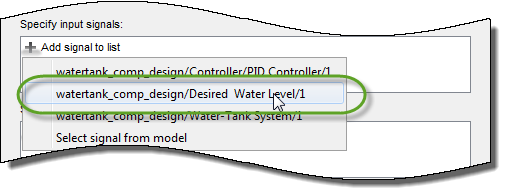
Добавить входной сигнал, в области Specify input signals, нажатие кнопки +. В выпадающем списке выберите выход блока Desired Water Level.
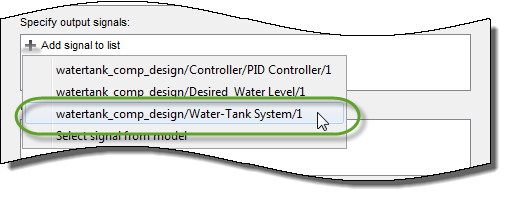
Добавить выходной сигнал, в области Specify output signals, нажатие кнопки +. В выпадающем списке выберите выход блока Water-Tank System.
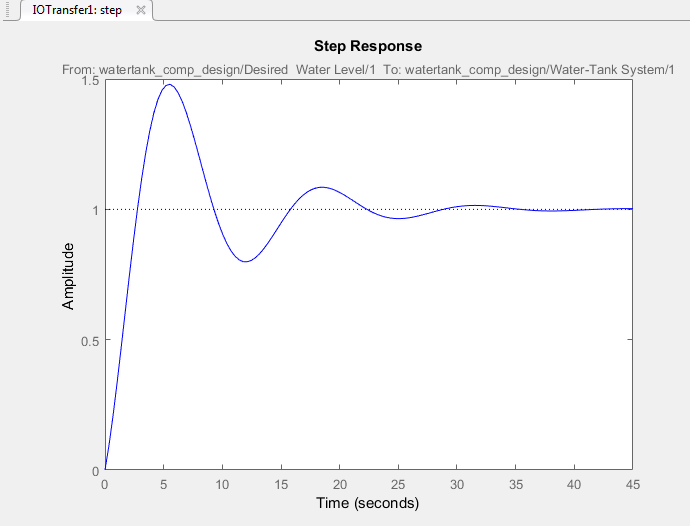
Чтобы создать передаточную функцию с обратной связью и построить переходной процесс, нажмите Plot.
Чтобы просмотреть максимальное перерегулирование на графике отклика, щелкните правой кнопкой по области построения и выберите Characteristics> Peak Response.
Чтобы просмотреть время нарастания на графике отклика, щелкните правой кнопкой по области построения и выберите Characteristics> Rise Time.
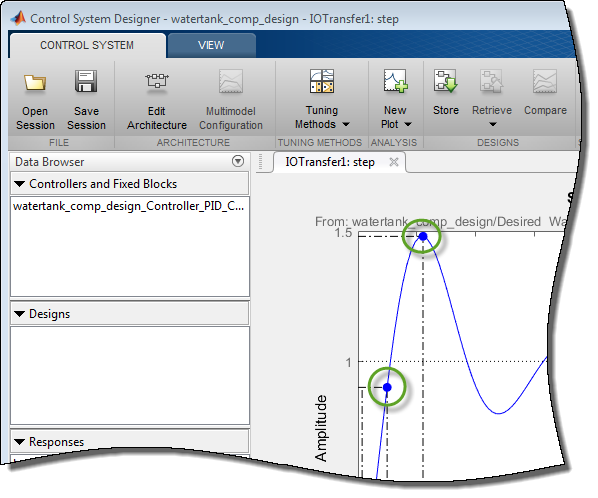
Наведение мыши характеристические индикаторы, чтобы просмотреть их значения. Текущий проект имеет a:
Максимальное перерегулирование 47,9%.
Время нарастания 2,13 секунд.
Этот ответ не удовлетворяет 5%-м конструктивным требованиям перерегулирования.
Чтобы настроить компенсатор с помощью автоматизированной настройки ПИДа, нажмите Tuning Methods и выберите PID Tuning.
В диалоговом окне PID Tuning, в разделе Specifications, выбирают следующие опции:
Tuning method — Robust response time
Controller Type — PI
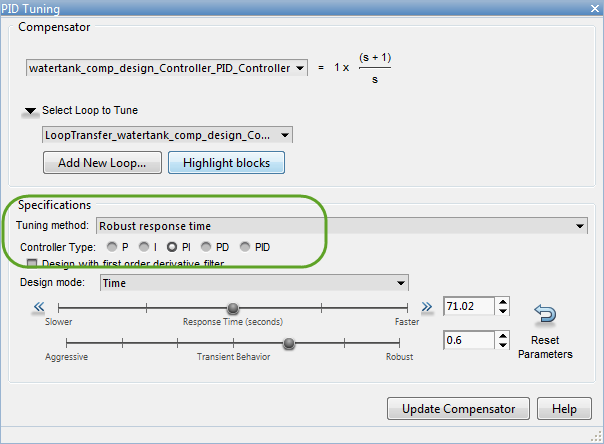
Нажмите Update Compensator. Обновления приложения ответ с обратной связью для новых настроек компенсатора и обновлений переходный процесс.
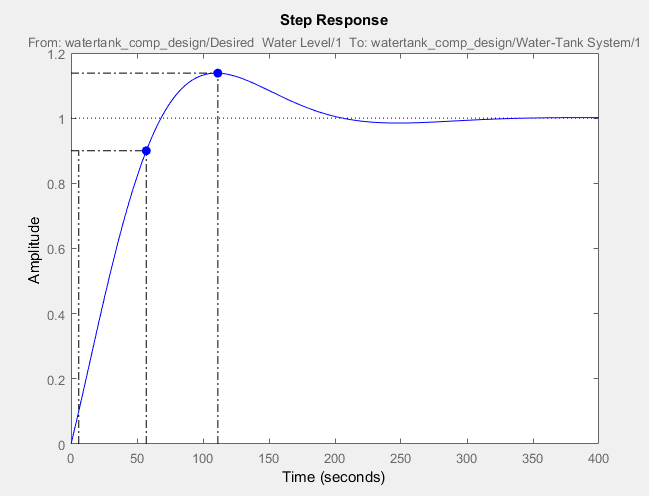
Проверять производительность системы, мышь по маркерам характеристики ответа. Отклик системы с настроенным компенсатором имеет a:
Максимальное перерегулирование 13,8%.
Время нарастания 51,2 секунд.
Этот ответ превышает максимальное позволенное перерегулирование 5%. Время нарастания намного медленнее, чем необходимое время нарастания пяти секунд.
Чтобы уменьшить время нарастания, в интерактивном режиме увеличьтесь, усиление компенсатора, использующее графический, Предвещают Настройку.
Чтобы открыть разомкнутый цикл Предвещают редактор, нажимают Tuning Methods и выбирают Bode Editor.
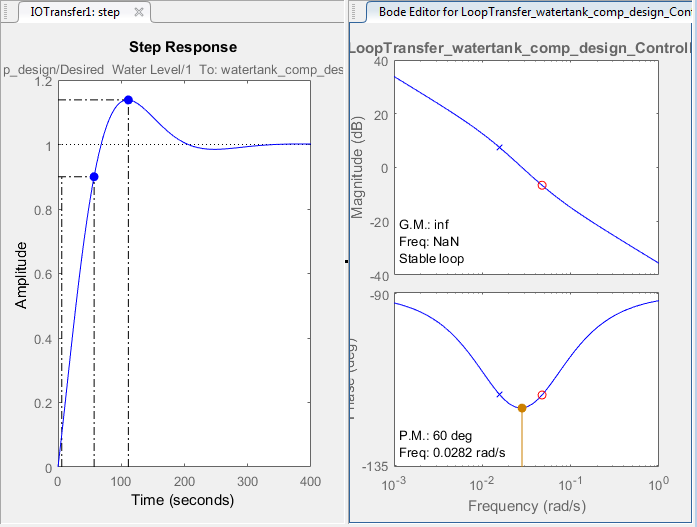
В диалоговом окне Select Response to Edit уже выбран ответ разомкнутого цикла при выходе блока PID Controller. Чтобы открыть Предвещать редактор для этого ответа, нажмите Plot.
Чтобы просмотреть Bode Editor и графики Step Response рядом друг с другом, на вкладке View, нажимают Left/Right.
В графике Bode Editor вытащите ответ величины, чтобы увеличить усиление компенсатора. Путем увеличения усиления вы увеличиваете пропускную способность и ускоряете ответ.
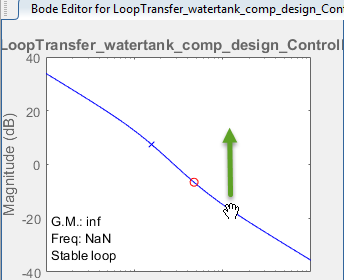
Когда вы перетаскиваете Предвещать ответ вверх, приложение автоматически обновляет компенсатор и связанные графики отклика. Кроме того, когда вы выпускаете график, в строке состояния, на правой стороне, отображения приложения обновленное значение усиления.
Увеличьте усиление компенсатора, пока переходной процесс не будет соответствовать конструктивным требованиям. Одно потенциальное решение должно установить усиление на 1.7.
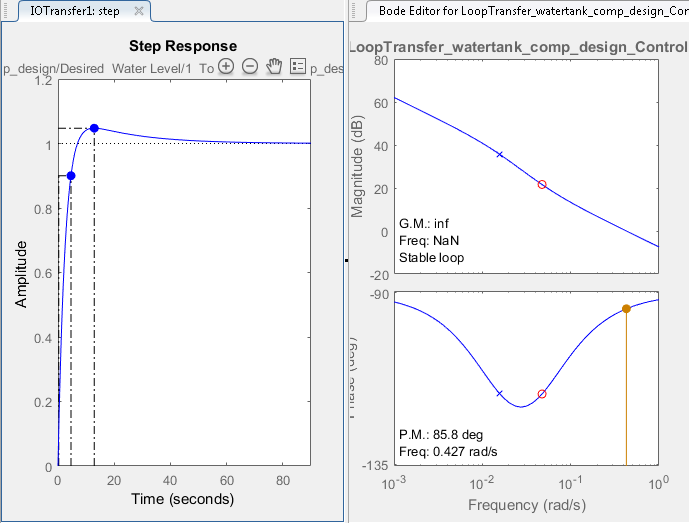
В этом значении усиления ответ замкнутого цикла имеет a:
Максимальное перерегулирование 4,74%.
Время нарастания 4,36 секунд.
Чтобы настроить параметры вашего компенсатора непосредственно, используйте редактор компенсатора. В Bode Editor щелкните правой кнопкой по области построения и выберите Edit Compensator.
В диалоговом окне Compensator Editor, на вкладке Parameter, настраивают усиления ПИД-регулятора. Для получения дополнительной информации о редактировании параметров компенсатора смотрите, что блоки Simulink Мелодии Используют Редактор Компенсатора.
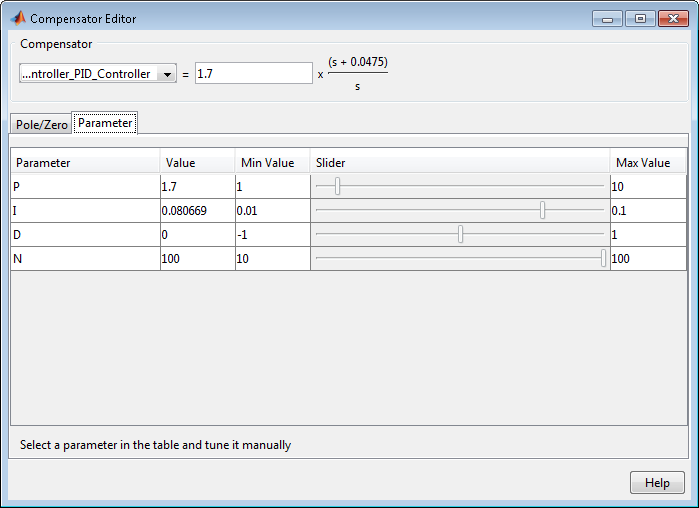
В то время как настроенный компенсатор соответствует конструктивным требованиям, время урегулирования составляет более чем 30 секунд. Чтобы улучшить время урегулирования, настройте P и параметры I контроллера вручную.
Например, установите параметры компенсатора на:
P = 4
I = 0.1
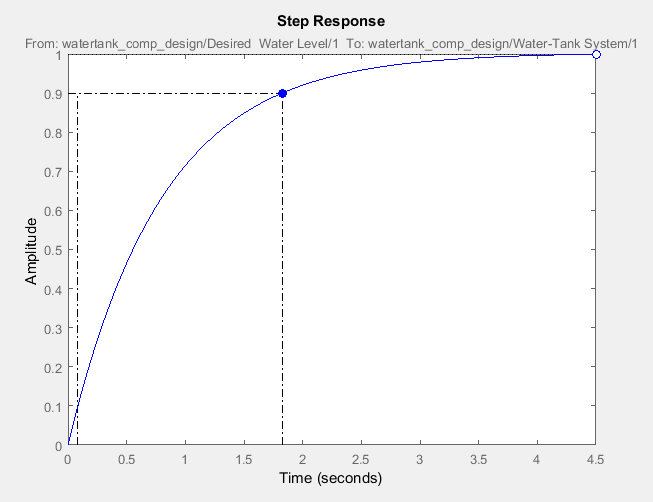
Этот компенсатор производит ответ с обратной связью с a:
Максимальное перерегулирование 0,206%.
Время нарастания 1,74 секунд.
Время урегулирования приблизительно трех секунд.
Подтвердите свой проект компенсатора путем симуляции нелинейной модели Simulink настроенными параметрами контроллера.
Чтобы записать настроенные параметры компенсатора в блок PID Controller, в Control System Designer, на вкладке Control System, нажимают Update Blocks.
В окне модели Simulink запустите симуляцию.
Чтобы просмотреть симуляцию с обратной связью выход, дважды кликните блок Scope.
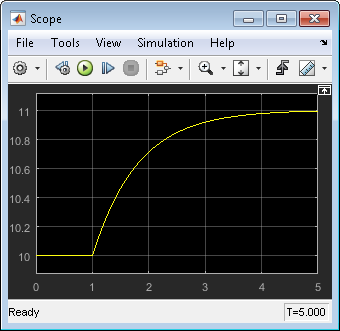
Ответ с обратной связью нелинейной системы удовлетворяет конструктивным требованиям временем нарастания меньше чем пяти секунд и минимального перерегулирования.
