Если вы не задаете рабочую точку при линеаризации модели Simulink®, программное обеспечение использует рабочую точку, заданную в модели по умолчанию. Рабочая точка модели состоит из начального состояния и значений входного сигнала, сохраненных в модели.
Для получения информации о линеаризации моделей в различных рабочих точках смотрите, Линеаризуют в Обрезанной Рабочей точке и Линеаризуют в Снимке состояния Симуляции.
В этом примере показано, как линеаризовать модель Simulink в рабочей точке, заданной в модели с помощью Linear Analysis Tool.
Открытая модель Simulink.
mdl = 'watertank'; open_system(mdl)
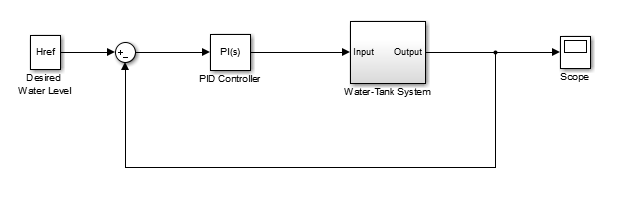
Блок Water-Tank System представляет объект в этой системе управления и включает всю системную нелинейность.
Чтобы задать фрагмент модели, чтобы линеаризовать, сначала откройте вкладку Linearization. Для этого в окне Simulink, в галерее Apps, нажимают Linearization Manager.
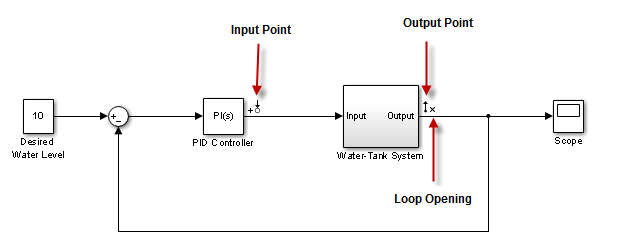
Чтобы задать аналитическую точку для сигнала, кликните по сигналу в модели. Затем на вкладке Linearization, в галерее Insert Analysis Points, выбирают тип аналитической точки.
Сконфигурируйте выходной сигнал блока PID Controller как Input Perturbation.
Сконфигурируйте выходной сигнал блока Water-Tank System как Open-loop Output. Выходная точка разомкнутого цикла является выходным измерением, сопровождаемым открытием цикла, которое удаляет эффекты сигнала обратной связи на линеаризации, не изменяя рабочую точку модели.
Когда вы добавляете линейные аналитические точки, программное обеспечение добавляет маркеры в их соответствующих местоположениях в модели. Для получения дополнительной информации о различных типах аналитических точек смотрите, Задают Фрагмент Модели, чтобы Линеаризовать.
Для получения дополнительной информации об определении аналитических точек в модели Simulink смотрите, Задают Фрагмент Модели, чтобы Линеаризовать в Модели Simulink. В качестве альтернативы, если вы не хотите вводить изменения в модели Simulink, можно задать аналитические точки с помощью Linear Analysis Tool. Для получения дополнительной информации смотрите, Задают Фрагмент Модели, чтобы Линеаризовать в Linear Analysis Tool.
Чтобы открыть Linear Analysis Tool для модели, в окне модели Simulink, в галерее Apps, нажимают Model Linearizer.
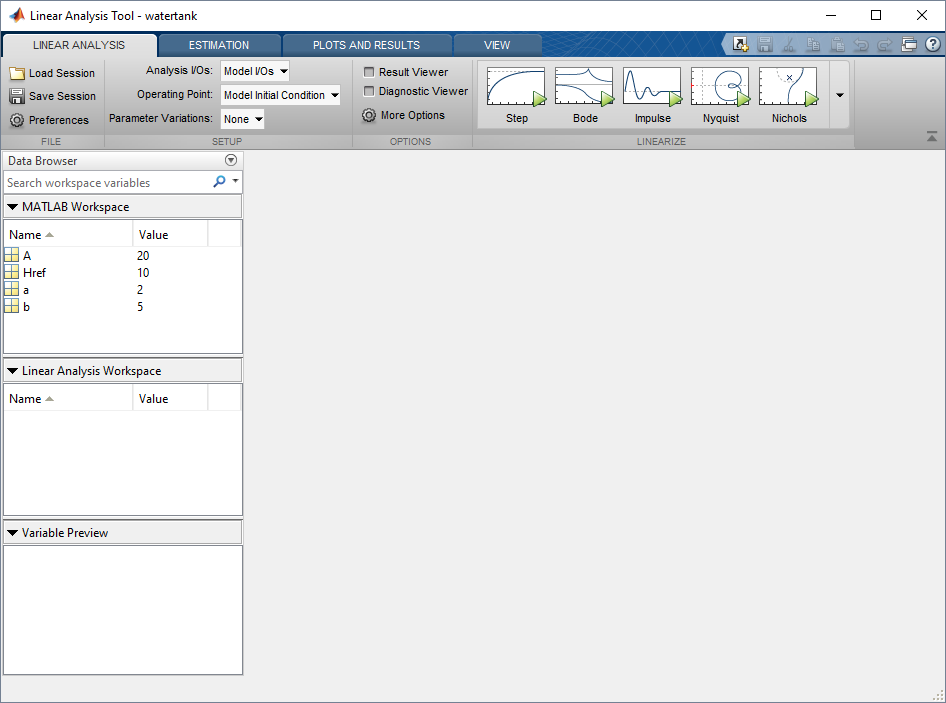
Использовать анализ указывает, что вы задали в модели Simulink как линеаризация I/Os, на вкладке Linear Analysis, в Analysis I/Os выпадающий список, отпуск Model I/Os выбранный.
В данном примере используйте рабочую точку модели в линеаризации. В Operating Point выпадающий список оставьте Model Initial Condition выбранный.
Чтобы линеаризовать систему и сгенерировать график отклика для анализа, в разделе Linearize, кликают по ответу. В данном примере, чтобы сгенерировать Диаграмму Боде для получившейся линейной модели, нажмите![]() Bode.
Bode.
Программное обеспечение добавляет линеаризовавшую модель, linsys1, к Linear Analysis Workspace и генерирует Диаграмму Боде для модели. linsys1 линейная модель от заданного входа до заданного выхода, вычисленного в рабочей точке модели по умолчанию.
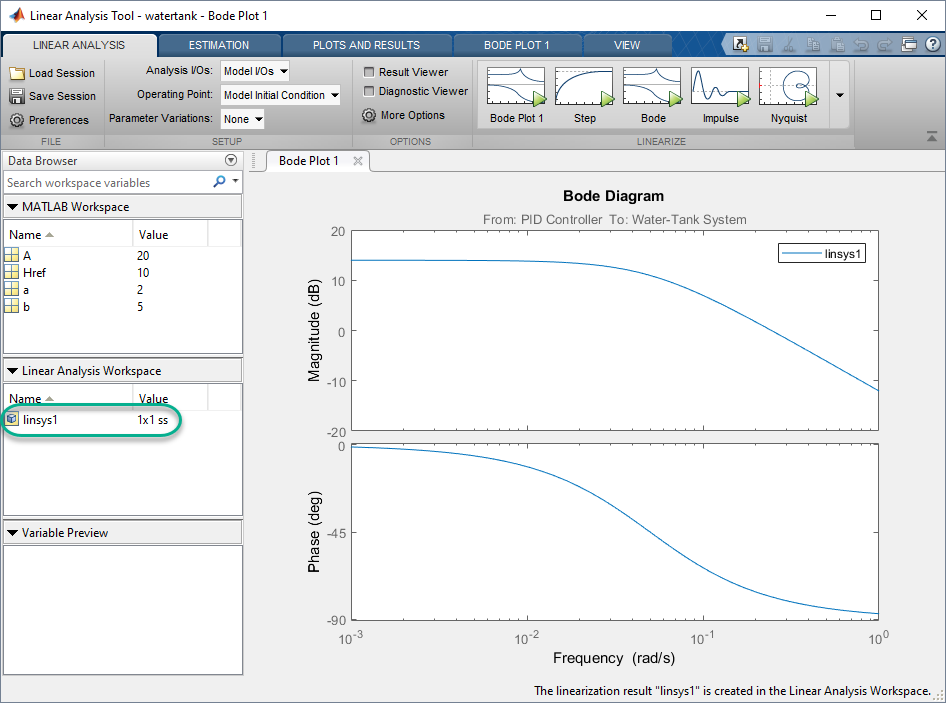
Для получения дополнительной информации об анализе линейных моделей смотрите Analyze Results Using Графики отклика Linear Analysis Tool.
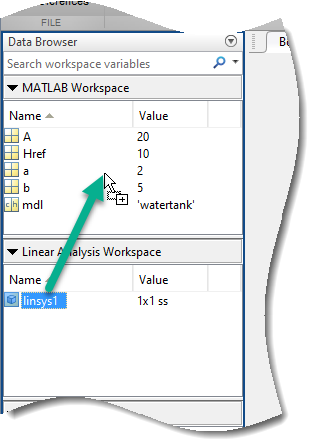
Можно также экспортировать линеаризовавшую модель в рабочую область MATLAB®. Для этого в Data Browser, перетащите linsys1 от Linear Analysis Workspace до MATLAB Workspace.
В этом примере показано, как линеаризовать модель Simulink® в рабочей точке модели с помощью linearize команда.
Открытая модель Simulink.
mdl = 'watertank';
open_system(mdl)

Для этой системы блок Water-Tank System содержит всю нелинейную динамику. Чтобы задать фрагмент модели, чтобы линеаризовать, создайте массив объектов ввода-вывода линеаризации с помощью linio команда.
Создайте входную аналитическую точку возмущения при выходе блока PID Controller.
io(1) = linio('watertank/PID Controller',1,'input');
Создайте разомкнутый цикл выходная аналитическая точка при выходе блока Water-Tank System. Выходная точка разомкнутого цикла является выходным измерением, сопровождаемым открытием цикла, которое удаляет эффекты сигнала обратной связи на линеаризации, не изменяя рабочую точку модели.
io(2) = linio('watertank/Water-Tank System',1,'openoutput');
Для получения информации о различных типах аналитических точек смотрите, Задают Фрагмент Модели, чтобы Линеаризовать.
Линеаризуйте модель в рабочей точке модели с помощью заданных аналитических точек.
linsys1 = linearize(mdl,io);
linsys1 линейная модель от заданного входа до заданного выхода, вычисленного в рабочей точке модели по умолчанию.
Можно затем анализировать ответ линеаризовавшей модели. Например, постройте Предвещать ответ.
bode(linsys1)

Для получения дополнительной информации об анализе линейных моделей смотрите Линейный Анализ (Control System Toolbox).
Linear Analysis Tool | linearize
