Отфильтруйте выбросы с помощью идентификатора Хампеля
DSP System Toolbox / Фильтрующий / Проекты Фильтра
Блок Hampel Filter обнаруживает и удаляет выбросы входного сигнала при помощи идентификатора Хампеля. Идентификатор Хампеля является изменением правила с тремя сигмами статистики, которая устойчива против выбросов. Для каждой выборки входного сигнала блок вычисляет медиану окна, состоявшего из текущей выборки и смежные выборки на каждой стороне текущей выборки. Len является длиной окна, которую вы задаете через параметр Window length. Блок также оценивает стандартное отклонение каждой выборки о ее медиане окна при помощи среднего абсолютного отклонения. Если выборка отличается от медианы больше, чем порог, умноженный на стандартное отклонение, фильтр заменяет выборку на медиану. Для получения дополнительной информации см. Алгоритмы.
Типы данных |
|
Прямое сквозное соединение |
|
Многомерные сигналы |
|
Сигналы переменного размера |
|
Обнаружение пересечения нулем |
|
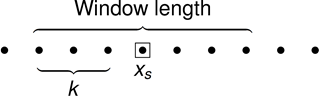
Для данной выборки данных, xs, алгоритма:
Сосредотачивает окно нечетной длины на текущей выборке.
Вычисляет локальную медиану, mi, и стандартное отклонение, σi, по активному окну данных.
Сравнивает текущую выборку с nσ × σi, где nσ является пороговым значением. Если , фильтр идентифицирует текущую выборку, xs, как выброс и заменяет его на среднее значение, mi.
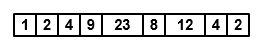
Рассмотрите систему координат данных, которые передаются в фильтр Hampel.
В этом примере фильтр Hampel двигает окно длины 5 (Len) по данным. Фильтр имеет пороговое значение 2 (nσ). Чтобы иметь полное окно в начале системы координат, алгоритм фильтра предварительно ожидает систему координат с Len – 1 нуль. Чтобы вычислить первую выборку выхода, окно сосредотачивается на выборка в добавленной системе координат, третий нуль в этом случае. Фильтр вычисляет медиану, среднее абсолютное отклонение и стандартное отклонение по данным в локальном окне.
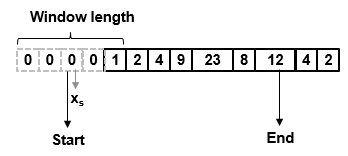
Текущая выборка: xs = 0.
Окно данных: win = [0 0 0 0 1].
Локальная медиана: mi = медиана ([0 0 0 0 1]) = 0.
Среднее абсолютное отклонение: . Для этого окна данных, .
Стандартное отклонение: σi = κ × madi = 0, где .
Текущая выборка, xs = 0, не выполняет отношение для определения выбросов.
Поэтому Hampel фильтруют выходные параметры текущая входная выборка, xs = 0.
Повторите эту процедуру для каждой последующей выборки, пока алгоритм не сосредоточит окно на выборка, отмеченная как End. Поскольку окно, сосредоточенное на последнем выборки не могут быть полными, эти выборки обрабатываются со следующей системой координат входных данных.
Вот первая выходная система координат, которую генерирует фильтр Hampel:
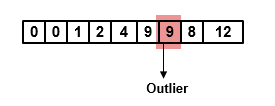
Седьмая выборка добавленного входного кадра, 23, является выбросом. Фильтр Hampel заменяет эту выборку на медиану по локальному окну [4 9 23 8 12].
[1] Боденхэм, декан. “Адаптивное обнаружение фильтрации и изменения для потоковой передачи данных”. Кандидатская диссертация. Имперский колледж, Лондон, 2012.
[2] Лю, Hancong, Сириш Шах и Вэй Цзян. “Онлайновое определение выбросов и очистка данных”. Компьютеры и Химическое машиностроение. Издание 28, март 2004, стр 1635–1647.
[3] Suomela, Юкка. Медианная фильтрация эквивалентна сортировке, 2014.
