Основанное на CORDIC приближение Декартова-к-полярному преобразования
[theta,r] = cordiccart2pol(x,y)
[theta,r] = cordiccart2pol(x,y, niters)
[theta,r] = cordiccart2pol(x,y, niters,'ScaleOutput',b)
[theta,r] = cordiccart2pol(x,y,
'ScaleOutput',b)
[theta,r] = cordiccart2pol(x,y)theta и радиус r, из Декартовых координат, x и y.
[theta,r] = cordiccart2pol(x,y, niters)niters итерации алгоритма.
[theta,r] = cordiccart2pol(x,y, niters,'ScaleOutput',b)b, масштабировать ли r выведите обратным значением усиления CORDIC.
[theta,r] = cordiccart2pol(x,y,
'ScaleOutput',b)r выведите обратным значением усиления CORDIC, в зависимости от булева значения b.
|
|
|
|
Дополнительные разделенные запятой пары Name,Value аргументы, где Name имя аргумента и Value соответствующее значение. Name должен появиться в одинарных кавычках ('').
|
Значение по умолчанию: |
|
|
|
|
Преобразуйте Декартовы координаты фиксированной точки в полярные координаты.
[thPos,r]=cordiccart2pol(sfi([0.75:-0.25:-1.0],16,15),sfi(0.5,16,15))
thPos =
0.5881 0.7854 1.1072 1.5708 2.0344 2.3562 2.5535 2.6780
DataTypeMode: Fixed-point: binary point scaling
Signedness: Signed
WordLength: 16
FractionLength: 13
r =
0.9014 0.7071 0.5591 0.5000 0.5591 0.7071 0.9014 1.1180
DataTypeMode: Fixed-point: binary point scaling
Signedness: Signed
WordLength: 18
FractionLength: 15
[thNeg,r]=...
cordiccart2pol(sfi([0.75:-0.25:-1.0],16,15),sfi(-0.5,16,15))
thNeg =
-0.5881 -0.7854 -1.1072 -1.5708 -2.0344 -2.3562 -2.5535 -2.6780
DataTypeMode: Fixed-point: binary point scaling
Signedness: Signed
WordLength: 16
FractionLength: 13
r =
0.9014 0.7071 0.5591 0.5000 0.5591 0.7071 0.9014 1.1180
DataTypeMode: Fixed-point: binary point scaling
Signedness: Signed
WordLength: 18
FractionLength: 15
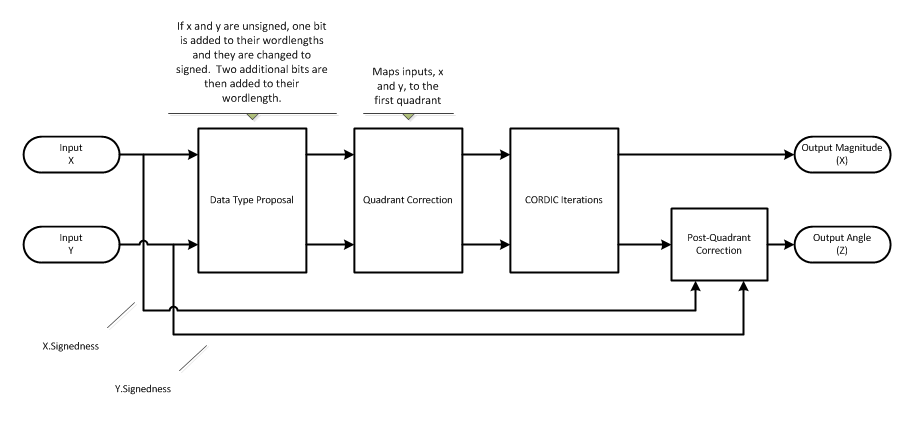
Точность ядра CORDIC зависит от выбора начальных значений для X, Y и Z. Этот алгоритм использует следующие начальные значения:
[1] Volder, JE. “Тригонометрический Вычислительный Метод CORDIC”. Транзакции IRE на Электронно-вычислительных машинах. Издание EC-8, сентябрь 1959, стр 330–334.
[2] Andraka, R. “Обзор алгоритма CORDIC для основанных на FPGA компьютеров”. Продолжения 1998 шестых международных симпозиумов ACM/SIGDA по Программируемым пользователем вентильным матрицам. 22-24 февраля 1998, стр 191–200.
[3] Вальтер, J.S. “Объединенный Алгоритм для Элементарных функций”. Hewlett-Packard Company, Пало-Альто. Компьютерная Конференция по Соединению Spring, 1971, стр 379–386. (из набора Компьютерного Исторического музея). www.computer.org/csdl/proceedings/afips/1971/5077/00/50770379.pdf
[4] Schelin, Чарльз В. “Приближение функций калькулятора”. Американская Mathematical Monthly. Издание 90, № 5, май 1983, стр 317–325.
