Ориентированные на дорожку мультигипотезы, отслеживающие присвоение
[ возвращает таблицу присвоений, assignments,unassignedrows,unassignedcolumns] = assignTOMHT(costmatrix,costThreshold)assignments, из обнаружений к дорожкам с помощью ориентированного на дорожку алгоритма мультигипотезы (TOMHT).
Стоимость каждого потенциального присвоения содержится в матрице стоимости, costmatrix. Каждая матричная запись представляет стоимость возможные присвоения. Строки матрицы представляют дорожки, и столбцы представляют обнаружения. Все возможные присвоения представлены в матрице стоимости. Чем ниже стоимость, тем более вероятно присвоение должно быть сделано. Каждая дорожка может быть присвоена самое большее одному обнаружению, и каждое обнаружение может быть присвоено самое большее одной дорожке. Если количество строк больше количества столбцов, некоторые дорожки являются неприсвоенными. Если количество столбцов больше количества строк, некоторые обнаружения являются неприсвоенными. Можно установить запись costmatrix к Inf запретить присвоение.
costThreshold представляет набор трех логических элементов, используемых в присвоении обнаружений к дорожкам.
Функция возвращает список неприсвоенных дорожек, unassignedrows, и список неприсвоенных обнаружений, unassignedcolumns.
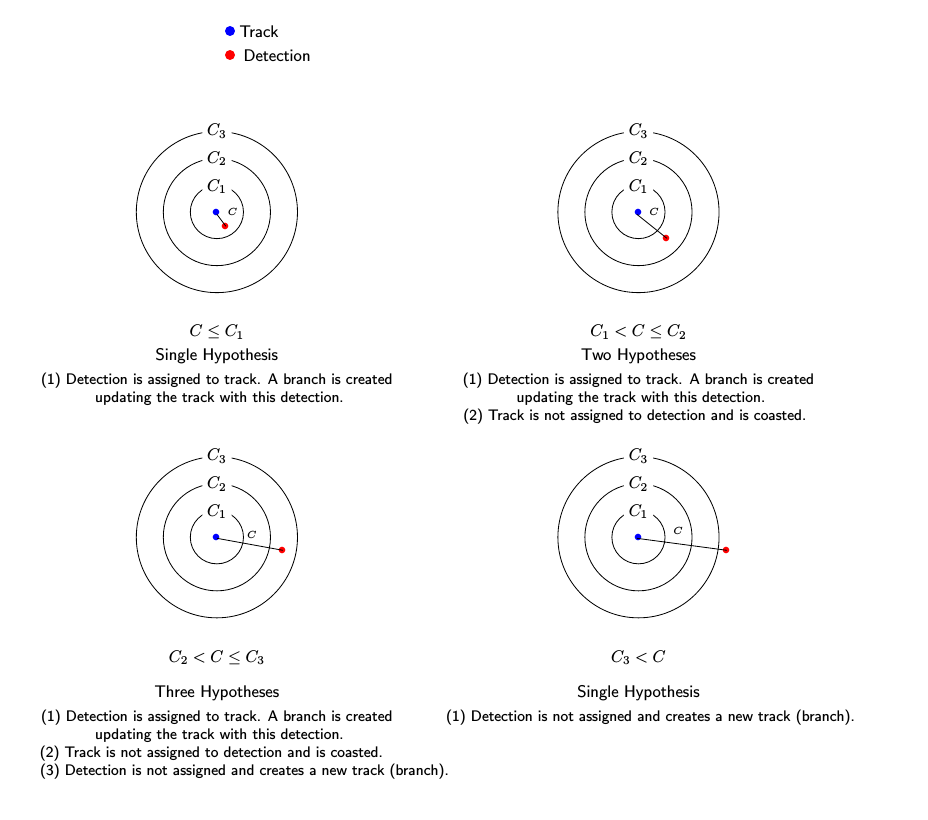
Три порога присвоения, C 1, C 2, и C 3, управляют (1) присвоением обнаружения к дорожке, (2) созданием новой ветви от обнаружения и (3) созданием новой ветви от неприсвоенной дорожки. Пороговые значения должны удовлетворить: C 1 <= C 2 <= C 3.
Если стоимостью присвоения является C = costmatrix(i,j), следующие гипотезы создаются на основе сравнения стоимости для значений порогов присвоения. Ниже каждого сравнения существует список возможных гипотез.
Советы:
Увеличьте значение C 3, если существуют обнаружения, которые должны быть присвоены дорожкам, но не являются. Уменьшите значение, если существуют обнаружения, которые присвоены дорожкам, которым они не должны быть присвоены (слишком далеко).
Увеличение значений, C 1 и C 2 помогает управлять количеством ветвей дорожки, которые создаются. Однако выполнение так сокращает количество ветвей (гипотезы), каждая дорожка имеет.
Чтобы позволить каждой дорожке, которая будет неприсвоенной, устанавливает C 1 = 0.
Чтобы позволить каждому обнаружению, которое будет неприсвоенным, устанавливает C 2 = 0.
[1] Вертманн, Джон Р. "Постепенное описание в вычислительном отношении эффективной версии нескольких отслеживание гипотезы". В Сигнале и Обработке данных Маленьких Целей 1992, издание 1698, стр 288-300. Международное общество Оптики и Фотоники, 1992.
