Отслеживание важно для руководства, навигации и управления автономных систем. Система слежения оценивает цели (количество целей и их состояний) и оценивает ситуативную среду в сфере интересов путем взятия обнаружений (кинематические параметры и атрибуты) и отслеживания этих целей со временем. Самая простая система слежения является системой отслеживания единой цели (STT) в clutterless среде, которая принимает одну цель только в сфере интересов. STT не требует присвоения данных или ассоциации, потому что обнаружение автономной цели может непосредственно питаться средство оценки, или фильтр раньше оценивал состояние цели.
Современные системы слежения обычно включают системы нескольких предназначаются для отслеживания (MTT), в которых один или несколько датчиков генерируют несколько обнаружений от нескольких целей, и одна или несколько дорожек используются, чтобы оценить состояния этих целей. MTT должен присвоить обнаружения дорожкам, прежде чем обнаружения смогут использоваться, чтобы обновить дорожки. Проблема присвоения MTT сложна из-за нескольких факторов:
Цель или распределение обнаружения — Если цели редко распределяются, то соединение цели к ее соответствующему обнаружению относительно легко. Однако, если цели или обнаружения плотно распределяются, присвоение становится неоднозначным, потому что присвоение цели к обнаружению или соседнему обнаружению редко имеет любые значения на стоимости.
Вероятность обнаружения (P d) датчика — P d описывает вероятность, что цель обнаруживается датчиком, если цель в поле зрения датчика. Если P d датчика мал, то истинная целевая сила не генерирует любое обнаружение во время сканирования датчика. В результате дорожка, представленная истинной целью, может украсть обнаружения из других дорожек.
Разрешение датчика — разрешение Датчика определяет способность датчика различать обнаружения от двух целей. Если разрешение датчика является низким, то две цели в близости могут только дать начало одному обнаружению. Это нарушает общее предположение, что каждое обнаружение может только быть присвоено одной дорожке и результатам в неразрешимых конфликтах присвоения между дорожками.
Помеха или ложный сигнальный уровень датчика — Ложные предупреждения вводят дополнительные возможные присвоения и поэтому увеличивают сложность присвоения данных.
Количество целей и обнаружений — количество возможных присвоений увеличивается экспоненциально как количество увеличений обнаружений и целей. Поэтому получение оптимального присвоения требует большего количества расчетов.
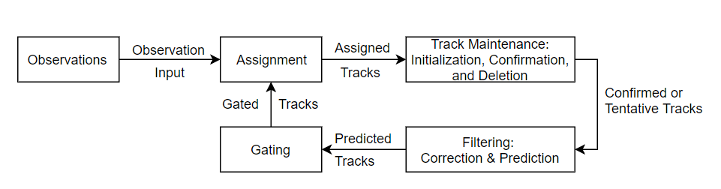
Фигура дает структурное представление функциональных элементов простой рекурсивной системы MTT [1]. В приложениях реального мира функции этих элементов могут значительно перекрыться. Однако это представление обеспечивает удобное разделение, чтобы ввести типичные функции в системе MTT.
Чтобы интерпретировать эту схему, примите, что средство отслеживания обеспечило подтвержденные или предварительные дорожки от предыдущего сканирования. Теперь система рассматривает, обновить ли дорожки на основе каких-либо новых обнаружений, полученных от датчиков. Присваивать обнаружения соответствующим дорожкам:
Внутренний фильтр (такой как Фильтр Калмана) предсказывает подтвержденные или предварительные дорожки от предыдущего шага до текущего шага.
Средство отслеживания использует предсказанную оценку и ковариацию, чтобы сформировать логический элемент валидации вокруг предсказанной дорожки.
Обнаружения, находящиеся в пределах логического элемента дорожки, рассматриваются как кандидатов на присвоение на дорожку.
Алгоритм присвоения (на основе определенного средства отслеживания, такого как GNN или TOMHT) определяет ассоциацию дорожки к обнаружению.
На основе присвоения средство отслеживания выполняет обслуживание дорожки, включая инициализацию, подтверждение и удаление:
Неприсвоенные наблюдения могут инициировать новые предварительные дорожки.
Предварительная дорожка становится подтвержденной, если качество дорожки удовлетворяет критериям подтверждения.
Низкокачественные дорожки удалены на основе критериев удаления.
Набор нового трека (предварительный и подтвердил) предсказан к следующему шагу сканирования, чтобы сформировать логические элементы валидации.
Обнаружение является собирательным термином, использованным, чтобы отослать ко всем наблюдаемым или измеренным количествам, включенным в отчет выход (см. objectDetection например) от датчика. В общем случае наблюдение может содержать измеренные кинематические количества (такие как область значений, угол обзора и уровень области значений) и измеренные атрибуты (такие как целевой тип, идентификационный номер и форма). Обнаружение должно также содержать время, в которое получены измерения.
Для целевого отслеживания точки обнаружения, полученные от одного сканирования датчика, могут содержать самое большее одно наблюдение от каждой цели. Это предположение значительно упрощает проблему присвоения. Один датчик может сгенерировать нулевые обнаружения для цели в ее поле зрения, потому что вероятность обнаружения, P d, каждого датчика обычно меньше 1. Кроме того, каждый датчик может сгенерировать ложные сигнальные обнаружения, которые не соответствуют истинным целям.
Датчики с высоким разрешением могут сгенерировать несколько обнаружений на цель, которая требует разделения обнаружений в одно представительное обнаружение прежде, чем питаться к основанным на присвоении средствам отслеживания (таким как trackerGNN, trackerJPDA, и trackerTOMHT). Смотрите Расширенный Объект Отследить и Оценка показателей производительности для получения дополнительной информации.
Для получения дополнительной информации о пропускании и присвоении, смотрите Введение в Методы Присвоения в Системах слежения, которое обеспечивает всестороннее введение методов присвоения. Этот раздел только покрывает основы пропускания и присвоения, используемого в трех основанных на присвоении средствах отслеживания, trackerGNN, trackerJPDA, и trackerTOMHT.
Пропускание является механизмом экранирования, используемым, чтобы определить, какие обнаружения являются допустимыми кандидатами, чтобы обновить существующие дорожки. Цель пропустить состоит в том, чтобы уменьшать ненужный расчет в присвоении дорожки к обнаружению. Логический элемент валидации предсказанной дорожки формируется с помощью предсказанного состояния и его связанной ковариации, такой, что обнаружения с высокой вероятностью ассоциации находятся в пределах логического элемента валидации дорожки. Только обнаружения в логическом элементе дорожки рассматриваются для присвоения с дорожкой.
После пропускания функция присвоения определяет который присвоения дорожки к обнаружению сделать. Три метода присвоения используются с тремя средствами отслеживания в тулбоксе:
trackerGNN — Глобальная самая близкая ассоциация данных. На основе теории вероятности цель метода GNN состоит в том, чтобы минимизировать полную функцию расстояния, которая рассматривает все присвоения дорожки к обнаружению.
trackerJPDA — Объединенная ассоциация данных о вероятности. Метод JPDA применяет мягкое присвоение, такое, что обнаружения в логическом элементе валидации дорожки могут все сделать взвешенные вклады в дорожку на основе их вероятности ассоциации.
trackerTOMHT — Ориентированный на дорожку на несколько отслеживание гипотезы. В отличие от GNN и JPDA, MHT является задержанным подходом решения, который позволяет трудным ситуациям ассоциации данных быть отложенными, пока больше информации не получено.
Решение которого средство отслеживания использовать зависит от типа целей и вычислительных доступных ресурсов:
Алгоритм GNN является самым простым использовать. Это имеет низкую вычислительную стоимость и может привести к соответствующей производительности для отслеживания редко распределенных целей.
Алгоритм JPDA, который требует большего количества вычислительной стоимости, также применим для широко расставленных целей. Это обычно выполняет лучше в среде помехи, чем GNN.
Средство отслеживания TOMHT, которое требует в большой степени на вычислительных ресурсах, обычно приводит к лучшей производительности среди всех этих трех средств отслеживания, специально для плотно распределенных целей.
Для получения дополнительной информации смотрите Отслеживающие Близко расположенные Цели Под примером Неоднозначности для сравнения этих трех средств отслеживания.
Обслуживание дорожки относится к функции инициирования дорожки, подтверждения и удаления.
Отследите Инициирование. Когда обнаружение не присвоено существующей дорожке, новый трек может должен быть быть создан:
Подход GNN запускает новые предварительные дорожки на наблюдениях, которые не присвоены существующим дорожкам.
Подход JPDA запускает новые предварительные дорожки на наблюдениях с вероятностью присвоения ниже, чем заданный порог.
Подход MHT запускает новые предварительные дорожки на наблюдениях, расстояния которых до существующих дорожек больше, чем заданный порог. Средство отслеживания использует последующие данные, чтобы определить, какая из этих недавно инициируемых дорожек допустима.
Отследите Подтверждение. Если предварительная дорожка формируется, логика подтверждения идентифицирует состояние дорожки. Три логики подтверждения дорожки используются в тулбоксе:
Логика истории: дорожка подтверждена, если дорожка была присвоена обнаружению, по крайней мере, для обновлений M во время последних обновлений N. Можно установить определенные значения для M и N. trackerGNN и trackerJPDA используйте эту логику.
Логика Счета дорожки: дорожка подтверждена, если ее счет выше, чем заданный порог. Более высокий счет дорожки означает, что дорожка, более вероятно, будет допустима. Счет является отношением вероятности, что дорожка от действительной цели до вероятности, что дорожка является ложной. trackerGNN и trackerTOMHT используйте эту логику.
Интегральная логика: дорожка подтверждена, если ее интегрированная вероятность существования выше, чем порог. trackerJPDA использование эта логика.
Отследите Удаление. Дорожка удалена, если она не обновляется в течение некоторого соответствующего времени. Критерии удаления дорожки похожи на критерии подтверждения дорожки:
Логика истории: дорожка удалена, если дорожка не была присвоена обнаружению, по крайней мере, времена P во время последних обновлений R.
Логика Счета дорожки: дорожка удалена, если ее счет уменьшается с максимального счета заданным порогом.
Интегральная логика: дорожка удалена, если ее интегрированная вероятность существования ниже, чем заданный порог.
Для получения дополнительной информации смотрите Введение, чтобы Отследить Логический пример.
Основные функции фильтра отслеживания:
Предскажите дорожки к текущему времени.
Вычислите расстояния от предсказанных дорожек до обнаружений и связанных вероятностей для пропускания и присвоения.
Откорректируйте предсказанные дорожки с помощью присвоенных обнаружений.
Sensor Fusion and Tracking Toolbox™ предлагает несколько фильтров отслеживания, которые могут использоваться с тремя основанными на присвоении средствами отслеживания (trackerGNN, trackerJPDA, и trackerTOMHT). Для всестороннего введения этих фильтров смотрите Введение в Фильтры Оценки.
Sensor Fusion and Tracking Toolbox обеспечивает инструменты, чтобы анализировать производительность отслеживания, если истины известны:
Можно использовать trackAssignmentMetrics оценивать производительность присвоения дорожки и обслуживания. trackAssignmentMetrics обеспечивает индексы, такие как количество дорожки подкачивает, количество шагов расхождения и количество избыточных присвоений.
Можно использовать trackErrorMetrics оценивать точность отслеживания. trackErrorMetrics вводит несколько среднеквадратичных (RMS) ошибочных значений, которые численно иллюстрируют производительность точности средства отслеживания.
Можно использовать trackOSPAMetric вычислить оптимальную метрику присвоения подшаблона. trackErrorMetrics обеспечивает три скалярных ошибочных компонента — ошибка локализации, помечая ошибку и ошибку кардинальности оценить производительность отслеживания.
trackerGNN, trackerJPDA, и trackerTOMHT основанные на присвоении средства отслеживания, означая, что присвоение дорожки к обнаружению требуется. Тулбокс также предлагает основанное на случайном конечном множестве (RFS) средство отслеживания, trackerPHD. Можно использовать его функции поддержки ggiwphd отслеживать расширенные объекты и gmphd отслеживать и расширенные объекты и цели точки.
ggiwphd | gmphd | objectDetection | trackerGNN | trackerJPDA | trackerPHD | trackerTOMHT
[1] Блэкмен, S. и R. Пополи. Проект и анализ современных систем слежения. Радарная библиотека дома Artech, Бостон, 1999.
[2] Musicki, D. и Р. Эванс. "Объединенная Интегрированная Вероятностная Ассоциация Данных: JIPDA". Транзакции IEEE на Космических и Электронных системах. Издание 40, Номер 3, 2004, стр 1093 - 1099.
[3] Вертманн, J. R.. "Постепенное Описание В вычислительном отношении Эффективной Версии Нескольких Отслеживание Гипотезы". В международном обществе Оптики и Фотоники, Издания 1698, стр 228 – 301, 1992.
