Motor Control Blockset™ обеспечивает инструмент оценки параметра, который оценивает моторные параметры точно. Используйте предполагаемые моторные параметры, чтобы симулировать модель электродвигателя и спроектировать систему управления. Поэтому ответ симуляции предполагаемыми параметрами для модели электродвигателя близко к поведению двигателя под тестом.
Инструмент оценки параметра определяет эти моторные параметры для Постоянного магнита Синхронный Двигатель:
Сопротивление фазы (Rs)
d и индуктивность оси q (Ld и Lq)
Обратная эдс, постоянная (Ke)
Моторная инерция (J)
Трение, постоянное (F)
Инструмент оценки параметра принимает минимальные необходимые входные параметры, запускает тесты на целевом компьютере и отображает предполагаемые параметры.
Инструменту оценки параметра нужно моторное положение, обнаруженное датчиками Холла. Это требует калибровки датчика Холла для двигателя под тестом.
Убедитесь, что PMSM находится в условии без загрузок.
Убедитесь, что PMSM имеет датчики Холла.
Калибруйте смещение датчика Холла. Для инструкций смотрите Калибровку Смещения Холла для Двигателя PMSM.
Этот пример поддерживает только эти аппаратные конфигурации:
Для настройки платы управления Instruments™F28069M Техаса:
Плата управления F28069M
Инвертор DRV8312-69M-KIT
PMSM с датчиком Холла
Предоставление мощности постоянного тока
Плата DRV8312-69M-KIT имеет известную проблему в разделе источника питания платы. Из-за этого ограничения, плата не поддерживает все типы датчика Холла. Например, это не поддерживает датчик Холла двигателя Teknic M-2310P.
Для настройки Texas Instruments LAUNCHXL-F28379D:
Контроллер LAUNCHXL-F28379D
Инвертор BOOSTXL-DRV8305
PMSM с датчиком Холла
Предоставление мощности постоянного тока
Чтобы запустить оценку параметра, вам нужны эти продукты:
Motor Control Blockset
Фиксированная точка Toolbox™
Только, чтобы создать целевые модели, вам нужны эти дополнительные продукты:
Embedded Coder®
Пакет поддержки Embedded Coder для процессоров Texas Instruments C2000™
Для настройки платы управления F28069M:
Соедините плату управления F28069M с J1 платы инвертора DRV8312-69M-KIT.
Соедините моторные три фазы с МОА, MOB и MOC на плате инвертора.
Соедините предоставление мощности постоянного тока с PVDDIN на плате инвертора.
Соедините энкодер датчика Холла выход с J10 на плате инвертора.
Для настройки LAUNCHXL-F28379D:
Присоедините плату инвертора к плате контроллера, таким образом, что J1, J2 BOOSTXL выравнивается с J1, J2 LAUNCHXL.
Соедините моторные три фазы с MOTA, MOTB и MOTC на плате инвертора BOOSTXL.
Соедините предоставление мощности постоянного тока с PVDD и GND на плате инвертора BOOSTXL.
Соедините датчик Холла выход с QEP_B (сконфигурированный как eCAP) на LAUNCHXL.
Для получения дополнительной информации относительно этих связей, смотрите Аппаратные Связи.
Для получения дополнительной информации относительно настроек модели, смотрите Параметры конфигурации Модели.
Для LAUNCHXL-F28379D загрузите пример программы к CPU2, например, программу, которая управляет синим LED CPU2 с помощью GPIO31 (c28379D_cpu2_blink.slx) гарантировать, что CPU2 по ошибке не сконфигурирован, чтобы использовать периферийные устройства платы, предназначенные в CPU1.
Инструмент оценки параметра включает целевую модель и модель хоста. Модели связываются друг с другом при помощи последовательного интерфейса. Для получения дополнительной информации смотрите Целевую Хостом Коммуникацию.
Введите системные детали о двигателе под тестом в модели хоста. Целевая модель использует алгоритм, чтобы выполнить тесты на двигателе и оценить моторные параметры. Модель хоста запускает эти тесты и отображает предполагаемые параметры.
Чтобы открыть модель хоста оценки параметра, введите эту команду:
open_system('mcb_param_est_host_read.slx');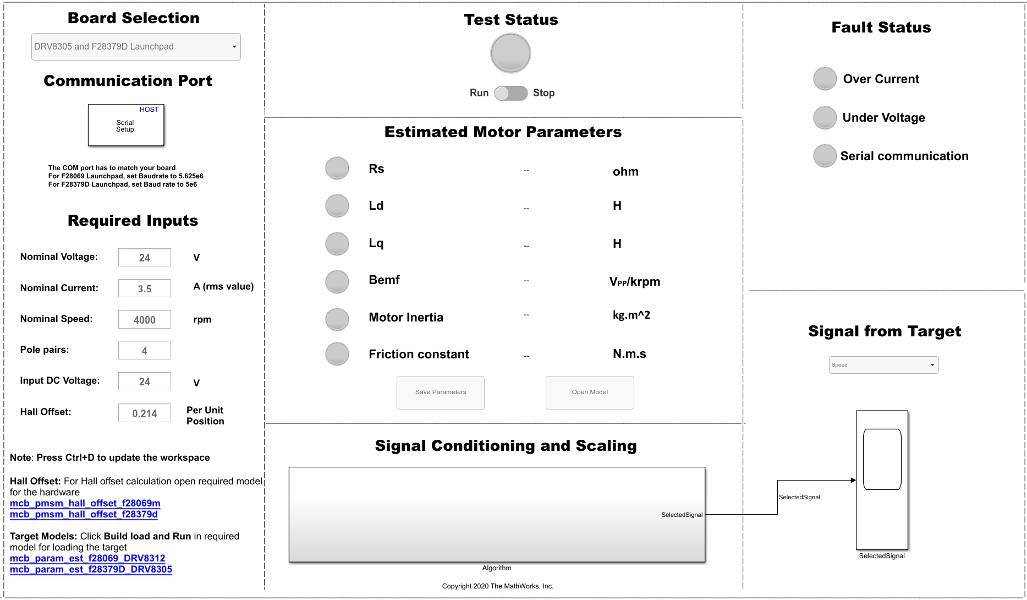
Введите эти детали в модель хоста, чтобы подготовить рабочую область:
Board Selection - Выберите комбинация инвертора и целевой компьютер.
Communication Port - Задайте последовательный порт, который вы хотите сконфигурировать. Выберите доступный порт из списка. Для получения дополнительной информации смотрите, Находят Коммуникационный порт.
Required Inputs - Введите эти моторные данные о спецификации. Можно получить эти значения или из моторной таблицы данных или на моторной шильде.
Nominal Voltage - Номинальное напряжение двигателя (Вольты).
Nominal Current - Номинальный ток двигателя (Ампер).
Nominal Speed - Расчетная скорость двигателя (об/мин).
Pole Pairs - Количество пар полюса двигателя.
Input DC Voltage - Напряжение предоставления DC для инвертора (Вольты).
Hall Offset - Датчик Холла возместил значение (положение на модуль) (см. Калибровку Смещения Холла для Моторной и Системы На модуль PMSM).
Во вкладке Debug модели хоста нажмите Update Model, чтобы обновить рабочую область с предыдущими входными параметрами.
При обновлении Required Inputs рассмотрите эти ограничения:
Расчетная скорость двигателя должна быть меньше 25000 об/мин.
Тесты защищают оборудование от отказов сверхтока. Однако, чтобы гарантировать, что эти отказы не происходят, сохраните номинальный ток двигателя (вводимым в поле Nominal Current) меньше, чем максимальный ток поддерживаемый инвертором.
Если у вас есть базирующийся модуль предоставления мощности постоянного тока SMPS, установите безопасный текущий предел для источника питания из соображений безопасности.
Прежде, чем запустить тесты при помощи инструмента оценки параметра, необходимо загрузить двоичные файлы (.hex/ .out) сгенерированный целевой моделью в целевой компьютер. Существует два рабочих процесса, чтобы загрузить двоичные файлы:
Workflow 1: Build and Deploy Target Model:
Используйте этот рабочий процесс, чтобы сгенерировать и развернуть код для целевой модели. Убедитесь, что вы обновляете рабочую область с необходимыми входными деталями из модели хоста.
Кликните по одной из этих гиперссылок в модели хоста оценки параметра, чтобы открыть целевую модель (для оборудования, которое вы используете):
Поскольку F28069M основывал контроллер:
mcb_param_est_f28069_DRV8312
Поскольку F28379D основывал контроллер:
mcb_param_est_f28379D_DRV8305
Нажмите Build, Deploy & Start во вкладке HARDWARE, чтобы развернуть целевую модель в оборудование.
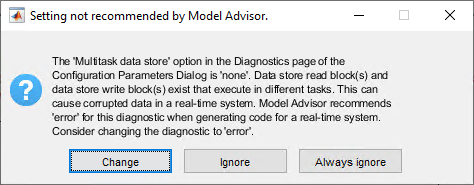
Проигнорируйте предупреждающее сообщение Multitask data store option in the Diagnostics page of the Configuration Parameter Dialog is none отображенный советником модели, путем нажатия кнопки Always Ignore. Это - часть намеченного рабочего процесса.
Workflow 2: Manually Download Target Model:
Используйте этот рабочий процесс, чтобы развернуть двоичные файлы (.hex/ .out) из целевой модели вручную при помощи стороннего инструмента (рабочему процессу не нужна генерация кода).
Найдите двоичные файлы (.hex/ .out) в этих местоположениях:
<matlabroot>\toolbox\mcb\mcbexamples\mcb_param_est_f28069_DRV8312.out
<matlabroot>\toolbox\mcb\mcbexamples\mcb_param_est_f28379D_DRV8305.out
Откройте стороннюю программу, чтобы развернуть двоичные файлы (.hex/ .out).
Загрузите и запустите двоичные файлы (.hex/ .out) на целевом компьютере.
Используйте следующие шаги, чтобы запустить инструмент оценки параметра Motor Control Blockset:
Убедитесь, что вы развертываете двоичные файлы (.hex/ .out) сгенерированный из целевой модели, к целевому компьютеру и обновлению необходимые детали в модели хоста.
В модели хоста нажмите Run во вкладке Simulation, чтобы запустить тесты оценки параметра.
Процесс оценки параметра занимает меньше чем минуту, чтобы выполнить тесты. Можно проигнорировать звук звукового сигнала, произведенный во время тестов.
Модель хоста отображает предполагаемые моторные параметры после успешного завершения тестов.
Инструмент использует следующий алгоритм, чтобы оценить параметры:
Моторное сопротивление (R) - Инструмент использует закон Ома, чтобы оценить это значение.
Моторная индуктивность (Ld и Lq) - инструмент использует метод инжекции частоты, чтобы оценить эти значения.
Обратная эдс (Ke) - Инструмент измеряет токи и напряжения и использует уравнение электродвигателя, чтобы оценить это значение.
Поток постоянного магнита (λ) - Инструмент использует предполагаемую обратную эдс, постоянную, чтобы оценить это значение.
Трение, постоянное (B) - инструмент, оценивает это значение при помощи уравнения крутящего момента для моторного выполнения на постоянной скорости.
Инерция (J) - Инструмент оценивает это значение при помощи теста промедления.
Расчетный Крутящий момент - инструмент оценивает это значение при помощи ориентировочной стоимости постоянного магнитного потока двигателя.
Во время чрезвычайной ситуации можно вручную повернуть переключатель ползунка Run-Stop к положению Stop, чтобы остановить тесты оценки параметра. Кроме того, модель прерывает тесты оценки параметра, чтобы защитить оборудование от следующих отказов:
Отказ сверхтока
Отказ пониженного напряжения
Отказ последовательной передачи
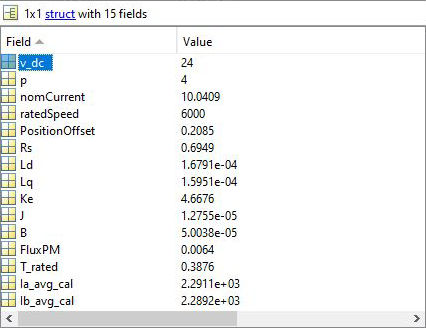
Можно экспортировать предполагаемые моторные параметры и далее использовать их в проекте системы управления и симуляции.
Чтобы экспортировать, нажмите Save Parameters, чтобы сохранить предполагаемые параметры в MAT (.mat) файл.
Чтобы просмотреть сохраненные параметры, загрузите MAT (.mat) файл в рабочей области MATLAB®. MATLAB сохраняет параметры в структуре под названием motorParam в рабочей области.
Нажмите Open Model, чтобы создать новую модель Simulink® с моторным блоком PMSM. Моторный блок использует motorParam переменные структуры из рабочего пространства MATLAB.
