Регулирование без обратной связи (также известный как Скалярное управление или управление Вольтами/Гц) является методом блока управления приводом, который варьируется напряжение статора и частота, чтобы контролировать скорость ротора. Это - простой метод, для которого не нужна никакая обратная связь от двигателя. Приложение постоянной скорости регулирования без обратной связи использует моторный источник питания фиксированной частоты. Принимая во внимание, что, для корректируемого приложения скорости регулирования без обратной связи нужен источник питания переменной частоты, чтобы контролировать скорость ротора. Чтобы гарантировать постоянный магнитный поток статора, мы сохраняем амплитуду напряжения предоставления пропорциональной ее частоте.
Эта модель запускает двигатель с помощью алгоритма управления двигателем разомкнутого цикла. Это помогает вам начать с Motor Control Blockset™ и проверить настройку оборудования путем выполнения двигателя. Целевая модель также читает значения ADC из датчиков тока и отправляет его в модель хоста при помощи последовательной передачи.
Поэтому эта модель может использоваться, чтобы достигнуть следующих целей:
Проверяйте возможность соединения с целью.
Проверяйте последовательную передачу с целью.
Проверьте аппаратную и программную среду.
Проверяйте Смещения ADC на датчики тока.
Запустите новый двигатель с инвертором и предназначайтесь для настройки в первый раз.
Целевая модель поддерживает следующие аппаратные конфигурации:
Настройка платы управления F28069M
Плата управления F28069M
Инвертор DRV8312-69M-KIT
BLY171D (двигатель, который поддерживает квадратурный энкодер),
Предоставление мощности постоянного тока (24 В)
Из-за связанной с источником питания аппаратной проблемы, инвертор DRV8312-69M-KIT не поддерживает двигатель Teknic M-2310P.
Настройка LAUNCHXL-F28069M
Контроллер LAUNCHXL-F28069M
BOOSTXL-DRV8301 и BOOSTXL-DRV8323 (поддерживаемые инверторы)
Моторный M-2310P Teknic и BLY171D (двигатели, которые поддерживают квадратурный энкодер),
Предоставление мощности постоянного тока (24 В)
Настройка LAUNCHXL-F28379D
Контроллер LAUNCHXL-F28379D
BOOSTXL-DRV8305 и BOOSTXL-3PHGANINV (поддерживаемые инверторы)
Моторный M-2310P Teknic и BLY171D (двигатели, которые поддерживают квадратурный энкодер),
Предоставление мощности постоянного тока (24 В)
Для настройки платы управления F28069M
Соедините плату управления F28069M с J1 платы инвертора DRV8312-69M-KIT.
Соедините моторные провода для трех фаз, на МОА, MOB и MOC на плате инвертора.
Соедините предоставление мощности постоянного тока (24 В) с PVDDIN на плате инвертора.
Присоедините квадратурный датчик энкодера к валу двигателя.
Соедините квадратурные контакты энкодера (G, я, A, 5 В, B) к J4 на плате инвертора.
Для LAUNCHXL-F28069M и настроек LAUNCHXL-F28379D
Присоедините плату инвертора BOOSTXL к J1, J2, J3, J4 на плате контроллера LAUNCHXL.
Соедините моторные провода для трех фаз, к MOTA, MOTB и MOTC на плате инвертора BOOSTXL.
Соедините предоставление мощности постоянного тока (24 В) с PVDD и GND на плате инвертора BOOSTXL.
Присоедините квадратурный датчик энкодера к валу двигателя.
Соедините квадратурные контакты энкодера (G, я, A, 5 В, B) к QEP_A на плате контроллера LAUNCHXL.
Для получения дополнительной информации относительно этих связей, смотрите Аппаратные Связи.
Motor Control Blockset
Embedded Coder®
Пакет поддержки Embedded Coder для процессоров Texas Instruments C2000
Fixed-Point Designer™
Для симуляции для этой модели только нужны Motor Control Blockset и Fixed-Point Designer.
Используйте следующие команды, чтобы открыть целевую модель:
Поскольку F28069M основывал контроллер:
open_system('mcb_open_loop_control_f28069M_DRV8312')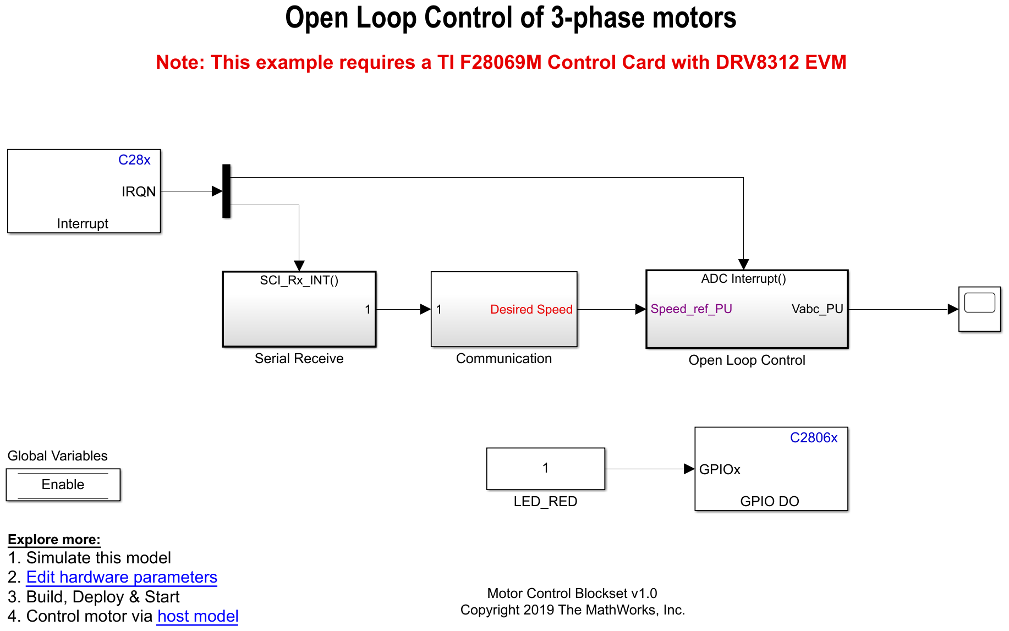
Поскольку F28379 основывал контроллер:
open_system('mcb_open_loop_control_f28379d')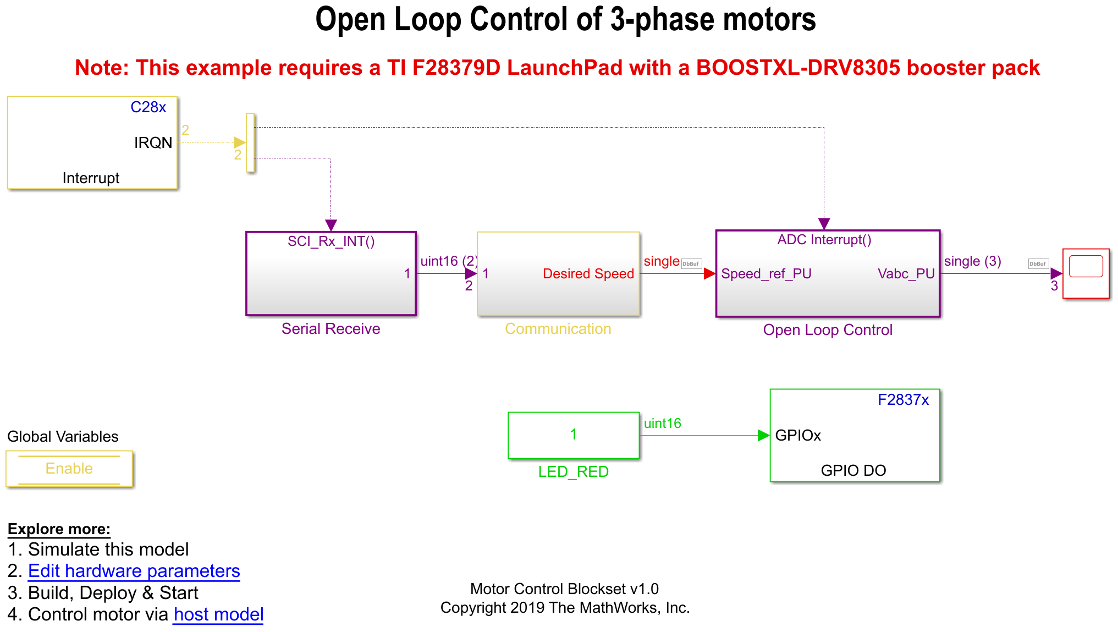
Используйте гиперссылку host model, доступную в нижней левой области целевых моделей, чтобы открыть модель хоста.
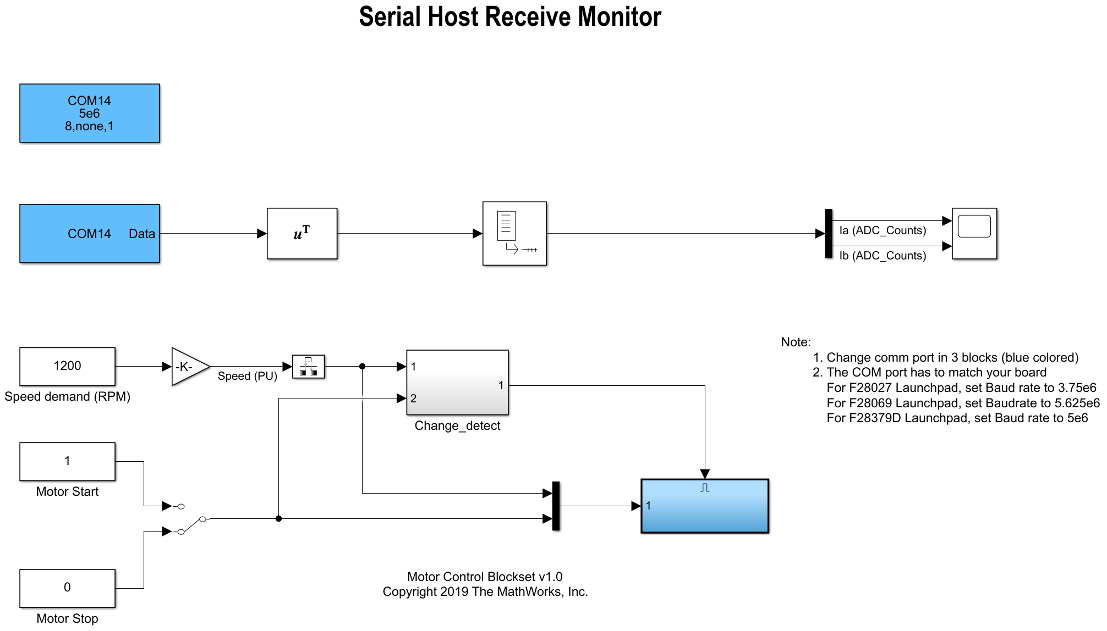
Модель хоста, которая работает на хосте - компьютере, получает текущее значение ADC от целевой модели и отображает количества ADC в осциллографе. Можно использовать Ручной Переключатель, чтобы или запуститься или остановить двигатель.
Обновите моторные параметры в скрипте инициализации модели, сопоставленном с целевой моделью, и запустите скрипт. Для инструкций обновить скрипт, смотрите Оценочные Усиления Управления от Моторных Параметров.
В маске блока Serial Receive модели хоста выберите значение Communication port.
В маске блока Serial Configuration модели хоста выберите значение Baud rate.
Загрузите пример программы к CPU2 LAUNCHXL-F28379D (например, программа, которая управляет синим LED CPU2 с помощью GPIO31), чтобы гарантировать, что CPU2 по ошибке не сконфигурирован, чтобы использовать периферийные устройства платы, предназначенные в CPU1.
Завершите аппаратные связи.
Сконфигурируйте аппаратные настройки (в Simulink) для целевой модели. Для инструкций смотрите Параметры конфигурации Модели.
Нажмите Build, Deploy & Start во вкладке HARDWARE, чтобы развернуть целевую модель в оборудование.
Кликните по гиперссылке host model в целевой модели, чтобы открыть связанную модель хоста.
Нажмите Run во вкладке SIMULATION, чтобы запустить модель хоста.
В модели хоста смените Ручное положение Переключателя к Моторному Запуску, чтобы начать запускать двигатель.
После моторных запусков откройте Осциллограф Времени в модели хоста, чтобы заметить, что ADC значит токи Ia и Ib.
Если двигатель не запускается, смените Ручное положение Переключателя к Моторной Остановке, чтобы остановить двигатель и изменить спрос на Скорость (об/мин) в модели хоста. Впоследствии, измените Ручной Переключатель в Моторный Запуск, чтобы запустить двигатель снова.
Завершите аппаратные связи и сконфигурируйте аппаратные настройки (в Simulink) для целевой модели. Для инструкций смотрите Параметры конфигурации Модели.
Нажмите Build, Deploy & Start во вкладке HARDWARE, чтобы развернуть целевую модель в оборудование.
Кликните по гиперссылке host model в целевой модели, чтобы открыть связанную модель хоста.
Отсоедините моторные провода для трех фаз от аппаратных терминалов платы.
Нажмите Run во вкладке SIMULATION, чтобы запустить модель хоста.
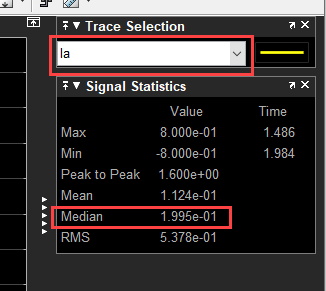
Открытый Осциллограф Времени в модели хоста, чтобы наблюдать ADC значит токи Ia и Ib. Средние значения количеств ADC являются коррекциями смещения ADC для токов Ia и Ib. Можно использовать эти шаги, чтобы получить средние (средние) значения количеств ADC:
В окне Scope перейдите к Tools> Measurements и выберите опцию Signal Statistics, чтобы отобразить области Trace Selection и Signal Statistics.
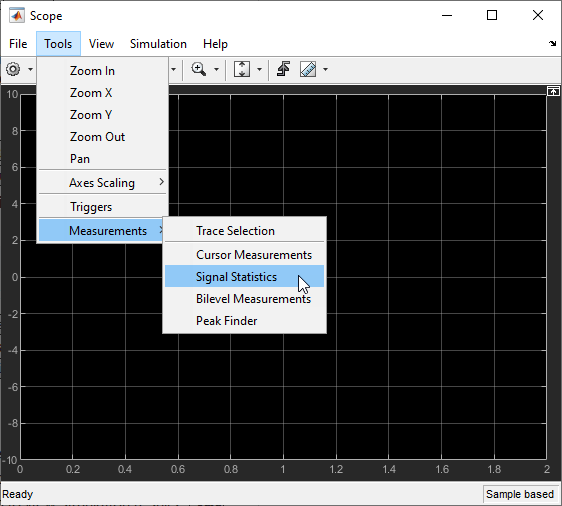
В Trace Selection область выбирают сигнал (Ia или Ib). Отображение окна характеристики выбранного сигнала в области Signal Statistics. Вы видите среднее значение выбранного сигнала в поле Median.
Этот пример поддерживает симуляцию. Откройте целевую модель и нажмите Run во вкладке SIMULATION, чтобы симулировать целевую модель. На целевой модели нажмите Data Inspector во вкладке SIMULATION, чтобы просмотреть результаты симуляции.
Для примеров Motor Control Blockset обновите вычисленный ADC (или текущий) значение смещения в скрипте инициализации модели, соединенном с примером. Для инструкций обновить скрипт, смотрите Оценочные Усиления Управления от Моторных Параметров.
Также обновите значение смещения ADC в средней модели для сигнала датчика тока создание условий схем. Для инструкций обновить среднюю модель, смотрите.
