Автоматически и последовательно настройте несколько циклов управления ПИДа в ориентированном на поле приложении управления
Motor Control Blockset / Средства управления / Контроллеры
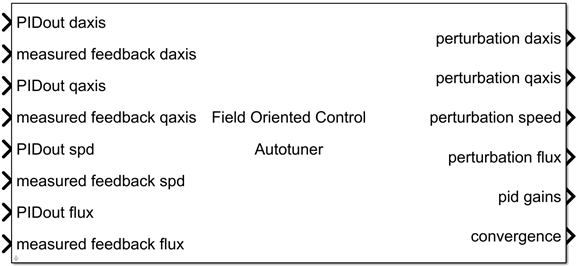
Блок Field Oriented Control Autotuner позволяет вам автоматически настраивать циклы управления ПИДа в своем приложении ориентированного на поле управления (FOC) в режиме реального времени. Для получения дополнительной информации об ориентированном на поле управлении смотрите, что Управление Частотой вращения двигателя Реализации Использует Ориентированное на поле управление (FOC).
Можно автоматически настроить ПИД-регуляторы, сопоставленные со следующими циклами:
Прямая ось (d-ось) текущий цикл
Квадратурная ось (q-ось) текущий цикл
Цикл скорости
Цикл потока
Для каждого цикла мелодии блока блок Field Oriented Control Autotuner выполняет автоматически настраивающийся эксперимент в с обратной связью без параметрической модели, сопоставленной с тем циклом. Блок позволяет вам задавать порядок, в котором настраиваются циклы управления. Когда настраивающийся эксперимент запускается для одного цикла, блок не оказывает влияния на другие циклы. Во время эксперимента, блока:
Вводит тестовый сигнал в объект, сопоставленный с тем циклом, чтобы собрать данные ввода - вывода объекта и оценить частотную характеристику в режиме реального времени. Тестовый сигнал является комбинацией синусоидальных сигналов возмущения, добавленных сверху входа объекта.
В конце эксперимента, параметров ПИД-регулятора мелодий на основе предполагаемых частотных характеристик объекта около целевой пропускной способности.
Записи обновили коэффициенты ПИД в блоке выход, позволив вам передать новые усиления существующим контроллерам и подтвердить производительность с обратной связью.
Можно использовать блок Field Oriented Control Autotuner, чтобы настроить существующие ПИД-регуляторы в структуре FOC. Если у вас нет начальных ПИД-регуляторов, можно использовать Оценочные Усиления Управления от Моторного рабочего процесса Параметров, чтобы получить их. Можно затем использовать блок Field Oriented Control Autotuner в улучшении или перенастройке.
Если у вас есть продукт генерации кода, такой как Simulink® Coder™, можно сгенерировать код, который реализует настраивающийся алгоритм на оборудовании, позволяя вам настроиться в реальное время, с помощью или не используя Simulink, чтобы справиться с процессом автоматической настройки.
Если вам смоделировали машину в Simulink с Motor Control Blockset™ и начальной структуре FOC с ПИД-регуляторами, можно выполнить автонастройку ПИД-регулятора с обратной связью против смоделированной машины. Выполнение так позволяет вам предварительно просмотреть ответ объекта и настроить настройки для автонастройки ПИД-регулятора прежде, чем настроить контроллер в режиме реального времени.
Блок поддерживает генерацию кода с Simulink Coder, Embedded Coder® и Simulink PLC Coder™. Это не поддерживает генерацию кода с HDL Coder™. Для приложений реального времени разверните сгенерированный код на оборудовании быстрого прототипирования, таком как машина реального времени Speedgoat.
Для получения дополнительной информации об использовании блока Field Oriented Control Autotuner смотрите ПИД-регуляторы Мелодии при помощи Ориентированного на поле Автотюнера Управления.
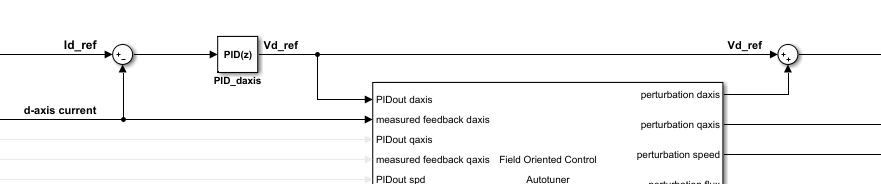
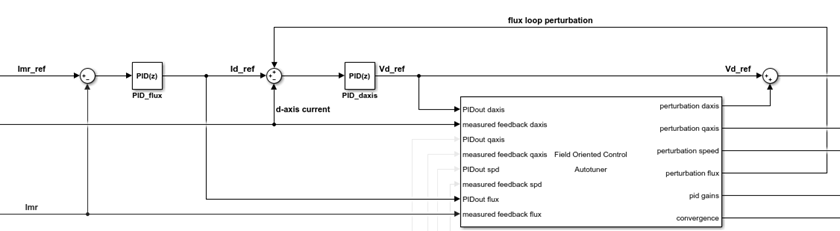
PIDout_daxis — Сигнал от прямой оси текущий контроллер Этот порт принимает выход контроллера d-оси PID_daxis, который является выходом ПИД-регулятора, который регулирует d-ось, текущую из двигателя. Контроллер генерирует ссылку напряжения d-оси Vd_ref, в то время как блок автотюнера FOC генерирует возмущения, используемые во время настраивающегося эксперимента в d-оси текущий цикл.
Чтобы включить этот порт, выберите Tune D-axis current loop.
Типы данных: single | double
measured feedback_daxis — Измеренная текущая прямая ось Этот порт принимает d-ось, текущую полученный из измеренного (обнаруженный или предполагаемый) моторные токи.
Чтобы включить этот порт, выберите Tune D-axis current loop.
Типы данных: single | double
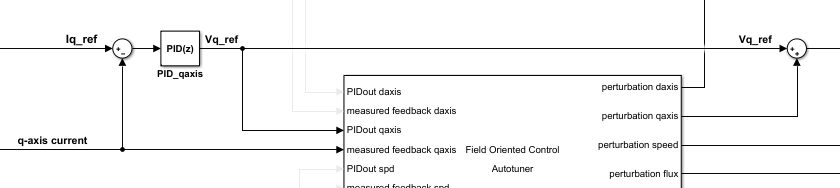
PIDout_qaxis — Сигнал от квадратурной оси текущий контроллер Этот порт принимает выход контроллера q-оси PID_qaxis, который является выходом ПИД-регулятора, который регулирует q-ось, текущую из двигателя. Контроллер генерирует ссылку напряжения q-оси Vq_ref, в то время как блок автотюнера FOC генерирует возмущения, используемые во время настраивающегося эксперимента в q-оси текущий цикл.
Чтобы включить этот порт, выберите Tune Q-axis current loop.
Типы данных: single | double
measured feedback_qaxis — Измеренная текущая квадратурная осьЭтот порт принимает q-ось, текущую полученный из измеренного (обнаруженный или предполагаемый) моторные токи.
Чтобы включить этот порт, выберите Tune Q-axis current loop.
Типы данных: single | double
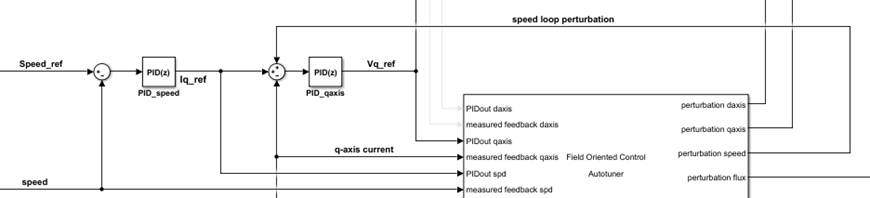
PIDout_spd — Сигнал от диспетчера скорости Этот порт принимает выход контроллера скорости PID_speed, который является выходом ПИД-регулятора, который регулирует скорость двигателя. Контроллер генерирует q-ось текущий ссылочный Iq_ref, в то время как блок автотюнера FOC генерирует возмущения, используемые во время настраивающегося эксперимента в цикле скорости.
Чтобы включить этот порт, выберите Tune speed loop.
Типы данных: single | double
measured feedback_spd — Измеренная скоростьЭтот порт принимает измеренное (обнаруженный или предполагаемый) скорость от двигателя.
Чтобы включить этот порт, выберите Tune speed loop.
Типы данных: single | double
PIDout_flux — Сигнал от диспетчера потока Этот порт принимает выход контроллера потока PID_flux, который является выходом ПИД-регулятора, который регулирует поток двигателя. Контроллер генерирует d-ось текущий ссылочный Id_ref, в то время как блок автотюнера FOC генерирует возмущения, используемые во время настраивающегося эксперимента в цикле потока.
Для постоянного магнита синхронного двигателя (PMSM) нет никакого контроллера цикла потока, когда поток ротора фиксируется и Id_ref обнуляется. В некоторых приложениях можно обеспечить отрицательный Id_ref значение, чтобы реализовать ослабляющее поле управление и достигнуть более высоких скоростей ротора за счет более высокого тока.
Чтобы включить этот порт, выберите Tune flux loop.
Типы данных: single | double
measured feedback_flux — Измеренный потокЭтот порт принимает измеренное (обнаруженный или предполагаемый) поток от двигателя.
Чтобы включить этот порт, выберите Tune flux loop.
Типы данных: single | double
start/stop — Запустите и прекратите автоматически настраивать экспериментЧтобы внешне запустить и остановить процесс автоматической настройки, обеспечьте сигнал в start/stop порт и ActiveLoop порт.
Эксперимент запускается, когда значение сигнала изменяется от отрицательного или нуля к положительному.
Эксперимент останавливается, когда значение сигнала изменяется от положительного до отрицательного или нуля.
На время эксперимента, для каждого цикла, блок вводит синусоидальные возмущения во входе объекта, сопоставленном с циклом, около номинальной рабочей точки, чтобы собрать данные ввода - вывода и оценить частотную характеристику. Когда эксперимент останавливается, блок вычисляет коэффициенты ПИД на основе частотных характеристик объекта, оцененных около целевой пропускной способности.
Когда эксперимент не запускается, блок не вводит возмущений во входных параметрах объекта. В этом состоянии блок не оказывает влияния на поведение контроллера или объект.
Как правило, можно использовать сигнал, который изменяется с 0 до 1, чтобы запустить эксперимент, и от 1 до 0, чтобы остановить его. Рассмотрите следующее, когда вы сконфигурируете start/stop сигнал.
Запустите эксперимент, когда двигатель будет в желаемой рабочей точке равновесия. Используйте начальный контроллер, чтобы управлять двигателем к рабочей точке.
Избегайте любого воздействия ввода или вывода на двигателе во время эксперимента. Если ваша существующая система с обратной связью имеет хорошее подавление помех, то эксперимент может обработать маленькие воздействия. В противном случае большие воздействия могут исказить объект выход и уменьшать точность оценки частотной характеристики.
Позвольте эксперименту, запускаемому достаточно долго для алгоритма, чтобы собрать достаточные данные для хорошей оценки на всех частотах, которые это зондирует. Существует два способа определить, когда остановить эксперимент:
Определите длительность эксперимента заранее. Осторожная оценка на время эксперимента является 200/ωc, где ωc является вашей целевой пропускной способностью.
Наблюдайте сигнал в convergence выведите и остановите эксперимент, когда сигнал стабилизирует близкие 100%.
Когда вы останавливаете эксперимент, блок вычисляет настроенные коэффициенты ПИД и обновляет сигнал в pid gains порт.
Можно сконфигурировать любую логику, подходящую для приложения, чтобы управлять запуском и временами остановки эксперимента. start/stop сигнал задан наряду с ActiveLoop. ActiveLoop принимает целочисленные значения 1 - 4 и задает который цикл настроиться.
В качестве альтернативы, если вы настраиваете симуляцию или режим external mode, можно задать настраивающуюся последовательность эксперимента, время начала и длительность в параметрах блоков.
Чтобы включить этот порт, на вкладке Block под Parameters Source, выбирают Use external source for start/stop of experiment.
Типы данных: single | double
ActiveLoop — Задайте активный цикл для автоматической настройки эксперимента Установите ActiveLoop значение, чтобы задать, который цикл настроиться при обеспечении внешнего источника для запуска и времен остановки настраивающегося эксперимента.
ActiveLoop Значение | Цикл, чтобы настроиться |
|---|---|
1 | D-axis текущий цикл |
2 | Q-axis текущий цикл |
3 | Speed цикл |
4 | Flux цикл |
Можно сконфигурировать любую логику, подходящую для приложения наряду с start/stop порт, чтобы управлять последовательностью и время, в который цикл, настраивающий запуски эксперимента. ActiveLoop принимает целочисленные значения от 1 до 4 и задает который цикл настроиться. Любой другой номер не приведет ни к какой настройке, происходящей независимо от start/stop сигнал. Например, когда вы предоставляете постоянное значение 2 в ActiveLoop и сигнал в start/stop повышения, блок запускает настраивающийся эксперимент для q-оси текущий цикл.
В качестве альтернативы можно задать настраивающуюся последовательность эксперимента, время начала и длительность в параметрах блоков.
Чтобы включить этот порт, на вкладке Block под Parameters Source, выбирают Use external source for start/stop of experiment.
Типы данных: single | double
bandwidth — Целевая пропускная способность для настройкиПредоставьте значения для Target bandwidth (rad/sec) параметр для каждого цикла, который будет настроен. Если вы настраиваете несколько циклов, можно задать пропускную способность как вектор или шину, записи которой соответствуют целевой пропускной способности для циклов в этом порядке:
D-ось текущий цикл
Q-ось текущий цикл
Цикл скорости
Цикл потока
Векторный сигнал должен быть задан как N-1 или сигнал 1 на n или, если задано, когда шина должна иметь элементы N, где N является количеством циклов, которые будут настроены. Например, если вы настраиваете q-ось текущий цикл и цикл скорости, и вы задаете вектор [5000, 200] в этом порте, блок настраивает q-ось текущий контроллер с целевой пропускной способностью 5 000 рад/секунда и контроллер цикла скорости с целевой пропускной способностью 200 рад/секунда.
Если вы настраиваете несколько циклов и задаете скалярное значение в этом порте, то блок использует ту же целевую пропускную способность, чтобы настроить все контроллеры. Для эффективного каскадного регулирования внутренние циклы управления (d-ось и q-ось) должны ответить намного быстрее, чем внешние циклы управления (поток и скорость). Поэтому необходимо предоставить целевую пропускную способность как вектор или сигнал шины при настройке нескольких циклов.
В качестве альтернативы можно задать целевую пропускную способность для отдельных циклов в параметрах блоков. Для получения дополнительной информации о том, как выбрать пропускную способность, см. то описание параметра.
Чтобы включить этот порт, на вкладке Block под Parameters Source, выбирают Use external source for bandwidth.
Типы данных: single | double
target PM — Целевой запас по фазе для настройкиПредоставьте значение для Target phase margin (degrees) параметр для каждого цикла, который будет настроен. Если вы настраиваете несколько циклов, можно задать target PM как вектор или шина, записи которой соответствуют целевому запасу по фазе для циклов в этом порядке:
D-ось текущий цикл
Q-ось текущий цикл
Цикл скорости
Цикл потока
Векторный сигнал должен быть задан как N-1 или сигнал 1 на n или, если задано, когда шина должна иметь элементы N, где N является количеством циклов, которые будут настроены. Например, если вы настраиваете q-ось текущий цикл и цикл скорости, и вы задаете вектор [60, 45] в этом порте, q-ось мелодий блока текущий контроллер с целевым запасом по фазе 60 градусов и контроллер цикла скорости с целевым запасом по фазе 45 градусов.
Если вы настраиваете несколько циклов и задаете скалярное значение в этом порте, то блок использует тот же целевой запас по фазе, чтобы настроить все контроллеры.
В качестве альтернативы можно задать целевой запас по фазе для отдельных циклов в параметрах блоков. Для получения дополнительной информации о том, как выбрать целевой запас по фазе, см. то описание параметра.
Чтобы включить этот порт, на вкладке Block под Parameters Source, выбирают Use external source for target phase margin.
Типы данных: single | double
sine Amp — Амплитуды введенных синусоидальных сигналов возмущенияПредоставьте значение для Sine Amplitudes параметр для каждого цикла, который будет настроен. Задайте одно из следующего:
Вектор длины 5, чтобы задать различную амплитуду в каждом из [1/10, 1/3, 1, 3, 10] ωc , где ωc является целевой пропускной способностью для настройки.
Матрица N-5, где N является количеством циклов, которые будут настроены. Каждая запись строки должна длины 5, чтобы задать различную амплитуду в каждом из [1/10, 1/3, 1, 3, 10] ωc .
Если вы настраиваете несколько циклов и задаете вектор длины 5 в этом порте, то блок использует заданную амплитуду во всех циклах в каждом из [1/10, 1/3, 1, 3, 10] ωc соответствие тому циклу.
В качестве альтернативы можно задать синусоидальную амплитуду возмущения для отдельных циклов в параметрах блоков. Для получения дополнительной информации см. описание параметра.
Чтобы включить этот порт, на вкладке Block под Parameters Source, выбирают Use external source for sine amplitudes.
Типы данных: single | double
