Вычислите электрическое положение и механическую скорость ротора
Motor Control Blockset / Средства оценки Sensorless
Блок Sliding Mode Observer вычисляет электрическое положение и механическую скорость PMSM при помощи на модульное напряжение и текущие значения вдоль α- и β - оси стационарной системы координат αβ.
Эти уравнения описывают расчет электрического положения и механической скорости блоком.
Эти уравнения описывают дискретное время, двигая операцию наблюдателя режима при помощи на стоимости единицы:
где:
обратная эдс статора и текущий для α оси.
обратная эдс статора и текущий для β оси.
напряжения предоставления статора.
сопротивление статора.
индуктивность статора.
потокосцепление из-за постоянного магнита.
электрическая скорость вращения.
электрическое положение ротора.
время.
период выборки.
демонстрационное количество.
номинальное напряжение, соответствующее 1 на модуль.
номинальное текущее соответствие 1 на модуль.
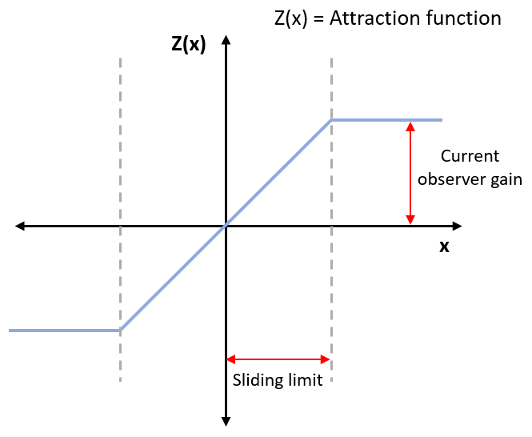
функция привлекательности.
частота среза фильтра в циклах на выборку.
частота среза в циклах в секунду.
демонстрационная частота в выборках в секунду.
предполагаемая обратная эдс.
[1] И. Кун, Н. В. Куинх, Ц. Хуан и Л. Хуан, "Проектирование и симуляция адаптивной регулировки скорости для основанного на SMO sensorless PMSM диск", 2 012 4-х Международных конференций по вопросам Интеллектуальных и Усовершенствованных Систем (ICIAS2012), Куала-Лумпур, 2012, стр 439-444 (doi: 10.1109/ICIAS.2012.6306234)
[2] Чжан Янь и В. Уткин, "Двигая наблюдателей режима для электрических машин - обзор", IEEE 2002 28-я Ежегодная конференция Общества Industrial Electronics. IECON 02, Севилья, 2002, стр 1842-1847 vol.3. (doi: 10.1109/IECON.2002.1185251)
[3] Т. Бернардес, В. Ф. Монтэгнер, Х. А. Грюндлинг и Х. Пинейро, "Дискретное время, Двигая Наблюдателя Режима для Векторного Управления Sensorless Постоянного магнита Синхронная Машина", в Транзакциях IEEE на Industrial Electronics, издании 61, № 4, стр 1679-1691, апрель 2014 (doi: 10.1109/TIE.2013.2267700)
[4] Цз. Го и С. К. Пэнда, "Проект скользящего наблюдателя режима для sensorless управления SPMSM, действующего на средних скоростях и высоких скоростях", 2 015 Симпозиумов IEEE по Управлению Sensorless для Электрических Дисков (SLED), Сидней, Новый Южный Уэльс, 2015, стр 1-6. (doi: 10.1109/SLED.2015.7339255)
