Этот раздел объясняет, как оценить точность объекта (двигатель и инвертор) модель физического двигателя и загрузки, соединенной с двигателем. Необходимо подтвердить модель объекта управления и проверить, что результаты близко к измерениям физической системы перед использованием модели объекта управления для реализации усовершенствованных алгоритмов. Можно подтвердить систему путем сравнения переходного процесса регулировки скорости и текущего управления в симуляции и в целевом компьютере, соединенном с двигателем.
Используйте Усиления Параметра Управления Мелодией в качестве примера в Оборудовании и Подтвердите Объект, чтобы измерить переходной процесс текущих контроллеров и контроллеров скорости. Модель хоста в этом примере передает текущую ссылку на целевой компьютер и измеряет переходной процесс текущего контроллера.
Можно использовать любой пример регулировки скорости от Motor Control Blockset™, чтобы подтвердить систему.
Подтвердите регулировку скорости путем сравнения переходного процесса в симуляции и значениях тестирования оборудования.
Подтвердите d - ось текущее управление электрически или механически блокировка ротора и сравнение переходного процесса в симуляции и результатах тестирования оборудования.
Можно использовать другой метод, чтобы подтвердить d - ось текущее управление. Запустите двигатель на постоянной скорости и обеспечьте ступенчатое изменение в ссылочном d - текущая ось. Это требует двух модификаций в подсистеме регулировки скорости целевой модели. Установите вход ссылки постоянной скорости. Команда ссылка Id из модели хоста. Сравните переходной процесс d - ось, текущая в симуляции и в тестировании оборудования.
Подтвердите q - ось текущее управление путем механической связи двигателя с внешним динамометром, запускающимся в регулировке скорости. Это требует двух модификаций в подсистеме регулировки скорости целевой модели. Отбросьте Id и ссылку Iq от ПИ-контроллера скорости выход. Команда ссылка Id из модели хоста. Сравните переходной процесс q - ось, текущая в симуляции и в тестировании оборудования.
При получении переходного процесса в d - ось текущее управление, всегда используйте положительный шаг. Отрицательные величины Id могут повредить постоянный магнит в PMSM.
Смотрите Усиления Параметра Управления Мелодией в качестве примера в Оборудовании и Подтвердите Объект, чтобы развернуть модель в оборудование. Выполните моторную оценку параметра, потому что точность в модели объекта управления важна, чтобы совпадать с результатами симуляции аппаратным измерениям.
Прежде, чем сравнить ответы контроллера в симуляции и в целевом компьютере, крутящий момент загрузки в симуляции объекта должен совпадать с моторной загрузкой в физической системе. Выполните эти шаги, чтобы вычислить крутящий момент загрузки в физической системе и обновить расчетный крутящий момент загрузки в модели объекта управления.
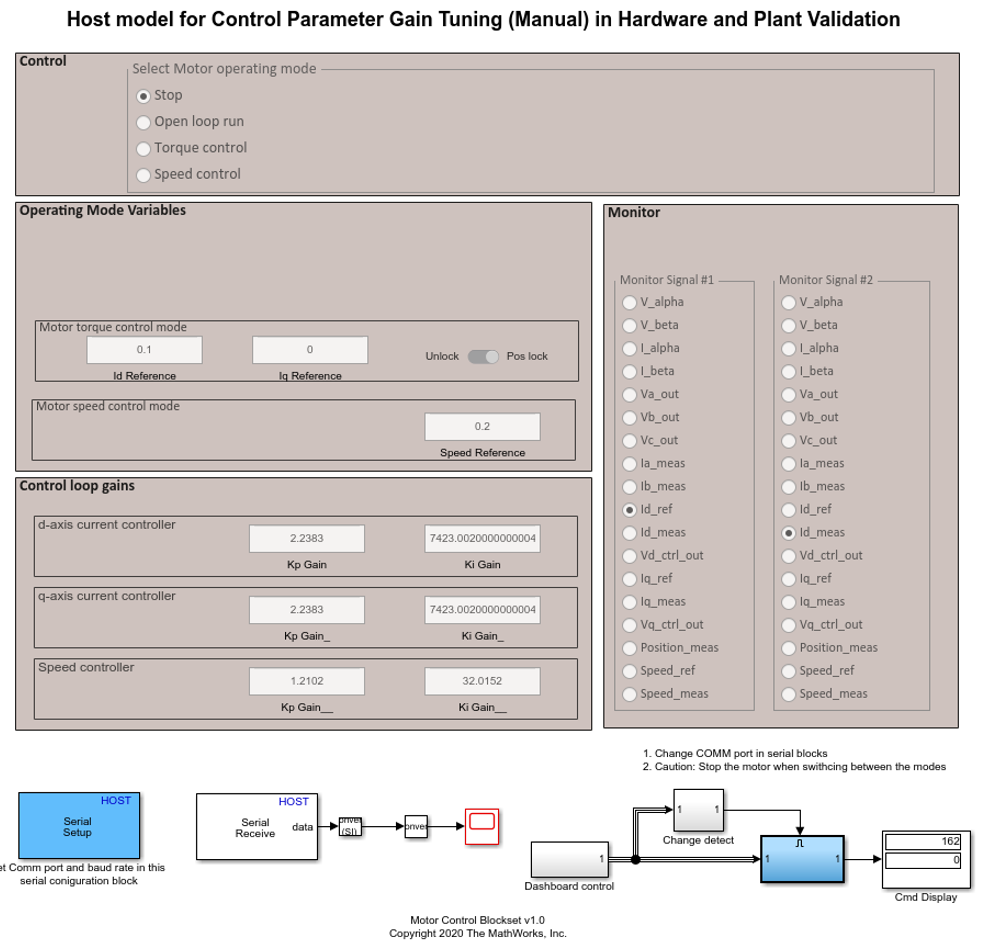
Запустите модель хоста и соедините целевой компьютер посредством последовательной передачи.
В Выбирают рабочий режим Motor, выбирают Speed control.
Двигатель вращается в регулировке скорости.
Выберите Id_meas in Monitor Signal #1 и Iq_meas in Monitor signal #2. Считайте Id_meas и Iq_meas значения от осциллографа.
Преобразуйте на модуль (PU), текущий в Амперы путем умножения его с PU_System.I_base.
Вычислите крутящий момент загрузки в Nm с помощью этого уравнения:
где,
= Магнитное потокосцепление Permanment (pmsm. Flux_PM)
= Индуктивность в Генри (pmsm. Ld, pmsm. Lq)
= Текущий измеренный в Амперах
Id_meas, измеренный I d текущий (в PU), равняется 0.
В mcb_pmsm_operating_mode_f28379d/Motor and Inverter/Plant Model (sim) система sub, введите расчетное значение крутящего момента загрузки как вход к порту LdTrq моторного блока PMSM.
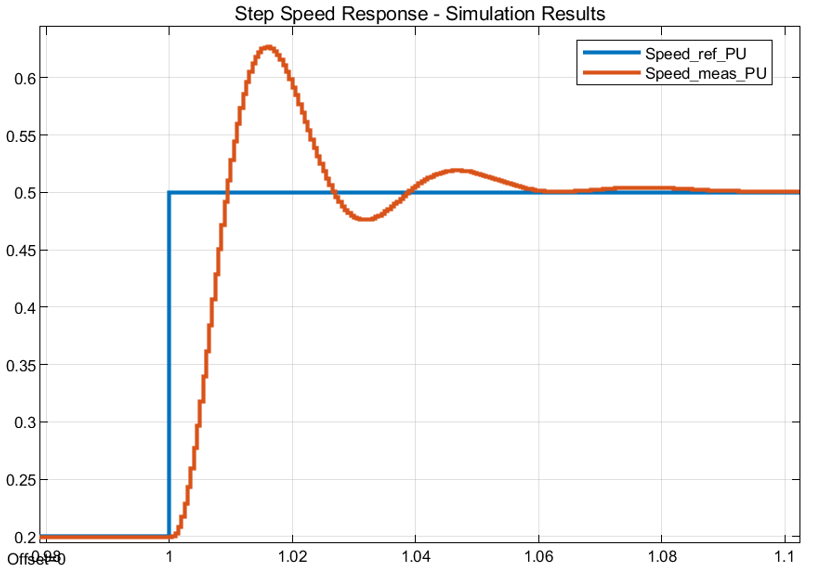
В симуляции обеспечьте вход шага скорости и отметьте ответ скорости. На целевом компьютере управляйте входом шага ссылки скорости и наблюдайте обратную связь скорости. Сравните получившийся переходной процесс в симуляции и в целевом компьютере, чтобы определить точность модели объекта управления.
Симулируйте модель mcb_pmsm_operating_mode_f28379d. Постройте ссылочную скорость и измеренные сигналы скорости. По умолчанию этот пример обеспечивает вход шага 0.2 к 0.5 к имитационной модели.
Запустите модель хоста, чтобы связаться с целевым компьютером.
В Выбирают рабочий режим Motor, изменяют режим от Stop до Speed control.
В модели хоста выберите Speed_ref in Monitor Signal#1 и Speed_meas in Monitor Signal#2.
Откройте осциллограф в модели хоста.
В интерфейсе модели хоста измените speed_ref от 0.2 к 0.5 и наблюдайте ступенчатое изменение в осциллографе.
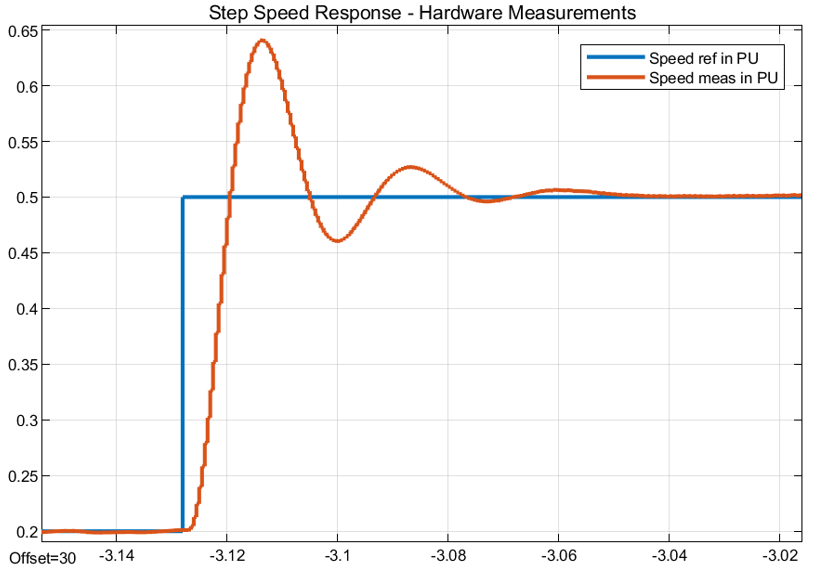
Сравните переходной процесс аппаратных результатов с результатами симуляции.
Сравните переходной процесс, полученный из симуляции с измерениями, полученными из целевого компьютера. Результаты могут варьироваться в зависимости от допусков по модели объекта управления. Обычно результаты симуляции близко к значениям, измеренным на целевом компьютере.
| Пиковое перерегулирование (%) | Пиковое время (мс) | Время нарастания (мс) | Время урегулирования (мс) | |
|---|---|---|---|---|
| Результаты симуляции | 20.13% | 16.023 | 5.561 | 61.027 |
| Аппаратные результаты | 22 % | 14.324 | 5.041 | 51.148 |
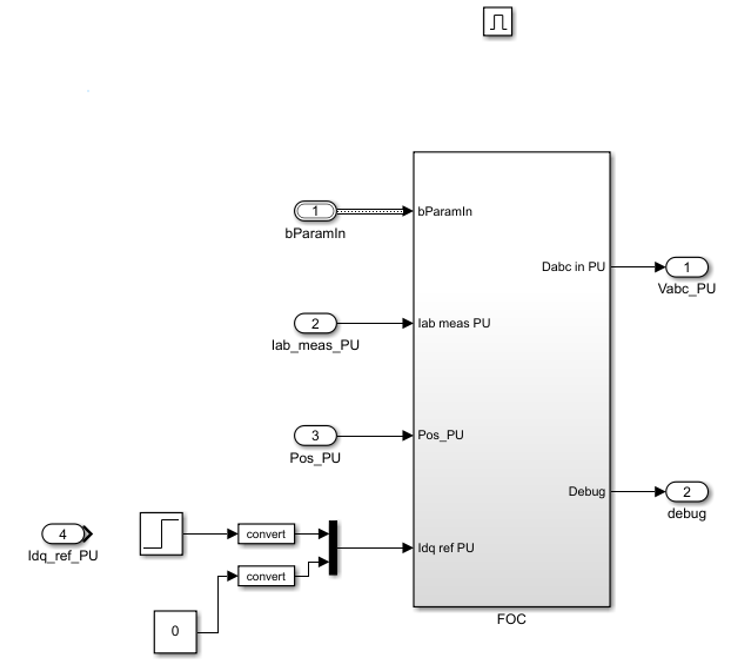
В симуляции предоставьте шагу текущую ссылку и отметьте текущий ответ. Для этого примера нужны некоторые изменения, чтобы симулировать текущий ссылочный вход шага. Смотрите эти шаги для изменений модели. Это применяется только к симуляции. В целевом компьютере управляйте текущим ссылочным входом шага и наблюдайте текущую обратную связь. Сравните получившийся переходной процесс в симуляции и в целевом компьютере, чтобы определить точность модели объекта управления.
Для аппаратных измерений запустите модель хоста.
В Выбирают рабочий режим Motor, изменяют режим от Stop до Torque control.
Выберите Id_ref in Monitor Signal#1 и Id_meas in Monitor Signal#2 в модели хоста.
Откройте осциллограф в модели хоста.
Измените Id_ref от 0.02 к 0.22 и наблюдайте ступенчатое изменение в осциллографе. Убедитесь, что двигатель не запускается. Осциллограф отображает переходной процесс для Id_ref входной параметр.
Для симуляции два изменения необходимы в имитационной модели. В mcb_pmsm_operating_mode_f28379d/TorqueControl/Control Modes/torque_control подсистема добавляет вход шага для d - ось текущий контроллер. Выберите вход шага 0.02 к 0.22 в 1 второй. Выберите выборку Time как -1. В блоке преобразования типа данных выберите выходной тип данных как fixdt(1,32,17).
В моторном блоке PMSM, доступном в mcb_pmsm_operating_mode_f28379d/Motor and Inverter/Plant Model (sim) подсистема, измените Механическую Входную Настройку в Speed и вход 0 к входному порту Spd.
Запустите симуляцию и измерьте Idref_PU и Idmeas_PU значения в инспекторе данных Simulink®.
Сравните переходной процесс в оборудовании с результатами симуляции.
Сравните изображение осциллографа от симуляции с измерениями от целевого компьютера. Результаты могут варьироваться в зависимости от допусков по модели объекта управления. С точной моделью объекта управления результаты симуляции ближе к измеренным результатам целевого компьютера.
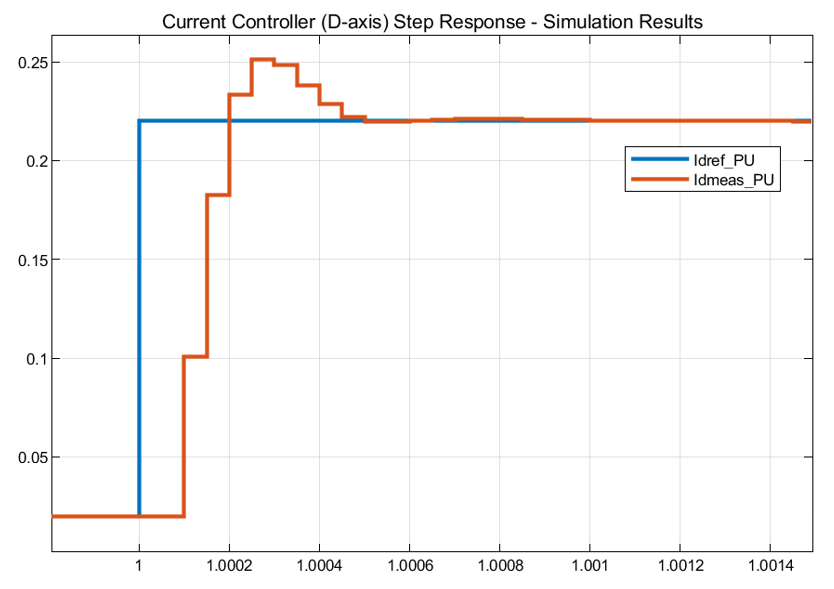
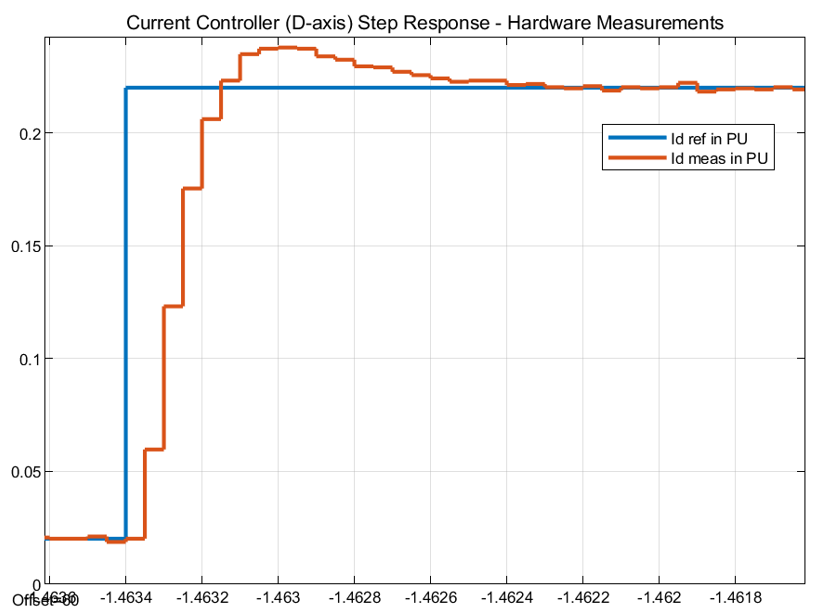
| Пиковое перерегулирование (%) | Пиковое время (µs) | Время нарастания (µs) | Время урегулирования (µs) | |
|---|---|---|---|---|
| Результаты симуляции | 14 % | 300 | 150 | 500 |
| Аппаратные результаты | 8.18 % | 400 | 150 | 800 |
Точность модели объекта управления улучшает точность симуляции и совпадает с тестовыми аппаратными результатами.
Если результаты симуляции значительно отличаются от аппаратных измерений, проверяют величину задержки и масштабный коэффициент в модели объекта управления.
Для q - ось текущий контроллер, выровняйте двигатель к d - ось и механически заблокируйте ротор. Следуйте за этим для d - ось текущий контроллер для сравнительного анализа. Можно достигнуть внешней блокировки механического устройства через механическую тормозную систему или путем связи с динамометрическим моторным выполнением в регулировке скорости.
