Двумерный детектор CFAR
phased.CFARDetector2D Система object™ реализует постоянный ложно-сигнальный детектор уровня (CFAR) для выбранных элементов (названный ячейками) данных о двухмерном изображении. Обнаружение объявляется, когда значение ячейки изображений превышает порог. Чтобы обеспечить постоянный ложный сигнальный уровень, порог устанавливается к кратному степени шума изображения. Детектор оценивает шумовую степень для ячейки под тестом (CUT) от окружающих ячеек с помощью одного из трех методов усреднения ячейки или метода статистики порядка. Методы усреднения ячейки являются усреднением ячейки (CA), самым большим - ячейки, составляющей в среднем (GOCA), или самый маленький - ячейки, составляющей в среднем (SOCA).
Для каждой тестовой ячейки, детектора:
оценивает шумовую статистическую величину от значений ячеек в учебной полосе, окружающей ячейку CUT.
вычисляет порог путем умножения шумовой оценки порогового фактора.
сравнивает значение ячейки CUT с порогом, чтобы определить, присутствует ли цель или отсутствует. Если значение больше порога, цель присутствует.
Запускать детектор
Задайте и настройте свой 2D детектор CFAR. Можно установить phased.CFARDetector2D Свойства системного объекта, когда вы создаете объект или оставляете их набором их значениям по умолчанию. Смотрите Конструкцию. Некоторые свойства, которые вы устанавливаете во время создания, могут быть изменены позже. Эти свойства являются настраиваемыми.
Найдите обнаружения путем вызова step метод. Выход этого метода зависит от свойств phased.CFARDetector2D Системный объект.
В качестве альтернативы вместо того, чтобы использовать step метод, чтобы выполнить операцию, заданную Системным объектом, можно вызвать объект с аргументами, как будто это была функция. Например, y = step(obj,x) и y = obj(x) выполните эквивалентные операции.
detector = phased.CFARDetector2Ddetector.
detector = phased.CFARDetector2D(Name,Value)detector, с каждым заданным свойством Name установите на заданный Value. Можно задать дополнительные аргументы пары "имя-значение" в любом порядке как (Name1, Value1..., NameN, ValueN).
| сброс | Сбросьте состояния Системного объекта |
| шаг | Двумерное обнаружение CFAR |
| Характерный для всех системных объектов | |
|---|---|
release | Позвольте изменения значения свойства Системного объекта |
В этом примере показано, как установить 2D порог CFAR, основанный на необходимой вероятности ложного предупреждения (PFA).
Примечание: можно заменить каждый вызов функции с эквивалентным step синтаксис. Например, замените myObject(x) с step(myObject,x).
Выполните составляющее в среднем ячейку обнаружение CFAR на 41 41 матрица ячеек, содержащих Гауссов шум. Оцените эмпирический PFA и сравните его с необходимым PFA. Чтобы получить хорошую оценку, выполните эту симуляцию на 1 000 подобных матриц. Во-первых, установите порог с помощью необходимого PFA. В этом случае нет никаких целей, и PFA может быть оценен от количества ячеек, которые превышают порог. Примите, что данные обрабатываются через квадратичный детектор и что никакое импульсное интегрирование не выполняется. Используйте полосу учебной ячейки 3 ячеек по ширине и 4 ячеек в высоте. Используйте защитную полосу 3 ячеек по ширине и 2 ячеек в высоте, чтобы разделить ячейки под тестом (CUT) от учебных ячеек. Задайте необходимый PFA 5.0e-4.
p = 5e-4; rs = RandStream.create('mt19937ar','Seed',5); N = 41; ntrials = 1000; detector = phased.CFARDetector2D('TrainingBandSize',[4,3], ... 'ThresholdFactor','Auto','GuardBandSize',[2,3], ... 'ProbabilityFalseAlarm',p,'Method','SOCA','ThresholdOutputPort',true);
Создайте 41 41 изображение, содержащее случайные комплексные данные. Затем придайте данным квадратную форму, чтобы симулировать квадратичный детектор.
x = 2/sqrt(2)*(randn(rs,N,N,ntrials) + 1i*randn(rs,N,N,ntrials)); x2 = abs(x).^2;
Процесс все ячейки в каждом изображении. Для этого найдите строку и столбец каждой ячейки CUT, учебная область которой падает полностью в каждом изображении.
Ngc = detector.GuardBandSize(2); Ngr = detector.GuardBandSize(1); Ntc = detector.TrainingBandSize(2); Ntr = detector.TrainingBandSize(1); cutidx = []; colstart = Ntc + Ngc + 1; colend = N - ( Ntc + Ngc); rowstart = Ntr + Ngr + 1; rowend = N - ( Ntr + Ngr); for m = colstart:colend for n = rowstart:rowend cutidx = [cutidx,[n;m]]; end end ncutcells = size(cutidx,2);
Отобразите ячейки CUT.
cutimage = zeros(N,N); for k = 1:ncutcells cutimage(cutidx(1,k),cutidx(2,k)) = 1; end imagesc(cutimage) axis equal

Выполните обнаружение на всех ячейках CUT. Возвратите классификацию обнаружений, и порог раньше классифицировал ячейку.
[dets,th] = detector(x2,cutidx);
Найдите и отобразите изображение с ложным предупреждением для рисунка.
di = []; for k = 1:ntrials d = dets(:,k); if (any(d) > 0) di = [di,k]; end end idx = di(1); detimg = zeros(N,N); for k = 1:ncutcells detimg(cutidx(1,k),cutidx(2,k)) = dets(k,idx); end imagesc(detimg) axis equal

Вычислите эмпирический PFA.
pfa = sum(dets(:))/ntrials/ncutcells
pfa = 4.5898e-04
Эмпирический и заданный PFA соглашается.
Отобразите среднее эмпирическое пороговое значение по всем изображениям.
mean(th(:))
ans = 31.7139
Вычислите теоретический пороговый фактор для необходимого PFA.
threshfactor = npwgnthresh(p,1,'noncoherent');
threshfactor = 10^(threshfactor/10);
disp(threshfactor)7.6009
Теоретический пороговый фактор, умноженный на шумовое отклонение, должен согласиться с измеренным порогом.
noisevar = mean(x2(:)); disp(threshfactor*noisevar);
30.4118
Теоретический порог и эмпирический порог соглашаются на в приемлемом различии.
Выполните составляющее в среднем ячейку обнаружение CFAR на 41 41 матрица ячеек, содержащих пять близко расположенных целей в Гауссовом шуме. Выполните это обнаружение на симуляции 1 000 изображений. Используйте два детектора с различными областями защитной полосы. Установите пороги вручную с помощью Custom 'ThresholdFactor' . Примите, что данные обрабатываются через квадратичный детектор и что никакое импульсное интегрирование не выполняется. Используйте учебную полосу ячейки 2 ячеек по ширине и 2 ячеек в высоте. Для первого детектора используйте защитную полосу 1 ячейки все вокруг, чтобы разделить ячейки CUT от учебных ячеек. Для второго детектора используйте защитную полосу 8 ячеек все вокруг.
Примечание: Этот пример запускается только в R2016b или позже. Если вы используете более ранний релиз, заменяете каждый вызов функции с эквивалентным step синтаксис. Например, замените myObject(x) с step(myObject,x).
p = 5e-4; rs = RandStream.create('mt19937ar','Seed',5); N = 41; ntrials = 1000;
Создайте 1000 41 41 изображения комплексного случайного шума со стандартным отклонением 1.
s = 1; x = s/sqrt(2)*(randn(rs,N,N,ntrials) + 1i*randn(rs,N,N,ntrials));
Установите значения целевых ячеек к 1,5. Затем придайте значениям ячеек квадратную форму.
A = 1.5; x(23,20,:) = A; x(23,18,:) = A; x(23,23,:) = A; x(20,22,:) = A; x(21,18,:) = A; x2 = abs(x).^2;
Отобразите целевые ячейки.
xtgt = zeros(N,N); xtgt(23,20,:) = A; xtgt(23,18,:) = A; xtgt(23,23,:) = A; xtgt(20,22,:) = A; xtgt(21,18,:) = A; imagesc(xtgt) axis equal axis tight

Установите ячейки CUT быть целевыми ячейками.
cutidx(1,1) = 23; cutidx(2,1) = 20; cutidx(1,2) = 23; cutidx(2,2) = 18; cutidx(1,3) = 23; cutidx(2,3) = 23; cutidx(1,4) = 20; cutidx(2,4) = 22; cutidx(1,5) = 21; cutidx(2,5) = 18;
Выполните обнаружение на всех ячейках CUT с помощью двух CFAR 2D детекторы. Первый детектор имеет небольшую область защитной полосы. Учебная область может включать соседние цели, которые могут влиять на расчет шумовой степени. Второй детектор имеет более крупную область защитной полосы, которая устраняет целевые ячейки от того, чтобы быть используемым в шумовом расчете.
Создайте два детектора CFAR.
detector1 = phased.CFARDetector2D('TrainingBandSize',[2,2], ... 'GuardBandSize',[1,1],'ThresholdFactor','Custom','Method','CA', ... 'CustomThresholdFactor',2,'ThresholdOutputPort',true); detector2 = phased.CFARDetector2D('TrainingBandSize',[2,2], ... 'GuardBandSize',[8,8],'ThresholdFactor','Custom','Method','CA', ... 'CustomThresholdFactor',2,'ThresholdOutputPort',true);
Возвратите классификации обнаружений, и пороги раньше классифицировали ячейки. Затем вычислите вероятности обнаружения.
[dets1,th1] = detector1(x2,cutidx); ndets = numel(dets1(:)); pd1 = sum(dets1(:))/ndets
pd1 = 0.6416
[dets2,th2] = detector2(x2,cutidx); pd2 = sum(dets2(:))/ndets
pd2 = 0.9396
Детектор с более крупной областью защитной полосы имеет более высокий PFA, потому что шум более точно оценивается.
2D CFAR требует оценки шумовой степени. Шумовая степень вычисляется из ячеек, которые приняты, чтобы не содержать любой целевой сигнал. Этими ячейками является training cells. Учебные ячейки формируют полосу вокруг ячейки ячейки под тестом (CUT), но могут быть разделены от ячейки CUT защитной полосой. Порог обнаружения вычисляется путем умножения шумовой степени пороговым фактором.
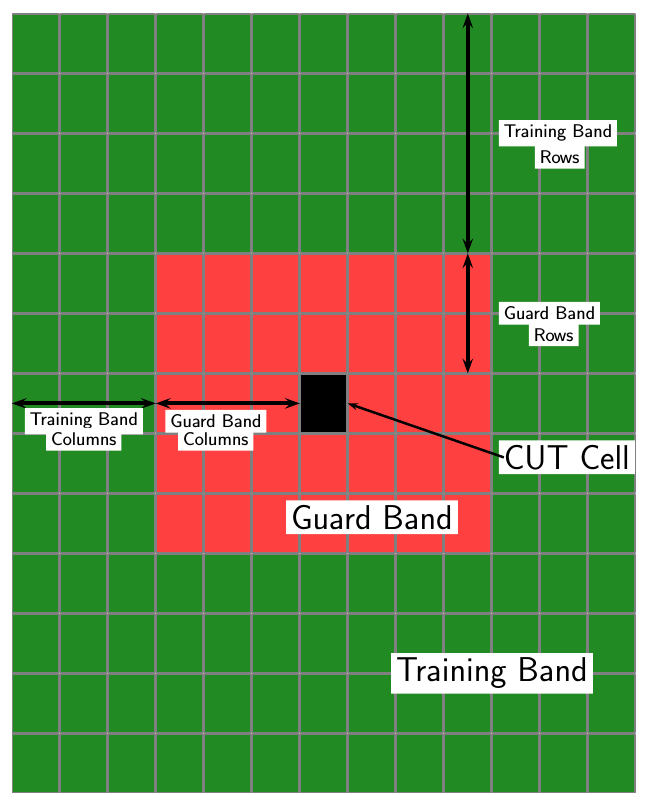
Для GOCA и усреднения SOCA, шумовая степень выведена из среднего значения одной из левых или правых половин учебной области ячейки.
Поскольку количество столбцов в учебной области является нечетным, ячейки в среднем столбце присвоены одинаково любому левая или правая половина.
При использовании статистического порядком метода ранг не может быть больше, чем количество ячеек в учебной области ячейки, Ntrain. Можно вычислить Ntrain.
NTC является количеством учебных столбцов полосы.
NTR является количеством учебных строк полосы.
NGC является количеством столбцов защитной полосы.
NGR является количеством строк защитной полосы.
Общим количеством ячеек в объединенной учебной области, защитной области и ячейке CUT является Ntotal = (2NTC + 2NGC + 1)(2NTR+ 2NGR + 1).
Общим количеством ячеек в объединенной защитной области и ячейки CUT является Nguard = (2NGC + 1)(2NGR + 1).
Количеством учебных ячеек является Ntrain = Ntotal – Nguard.
Конструкцией количество учебных ячеек всегда ровно. Поэтому, чтобы реализовать средний фильтр, можно выбрать ранг Ntrain/2 или Ntrain/2 + 1.
[1] Мотт, H. Антенны для радара и коммуникаций. Нью-Йорк: John Wiley & Sons, 1992.
[2] Ричардс, M. A. Основные принципы радарной обработки сигналов. Нью-Йорк: McGraw-Hill, 2005.
[3] Skolnik, M. Введение в радиолокационные системы, 3-го Эда. Нью-Йорк: McGraw-Hill, 2001.
