Симулируйте полученный сигнал в сенсорной матрице
x = sensorsig(pos,ns,ang)pos представляет положения элементов массива, каждый из которых принят, чтобы быть изотропным. ns указывает на количество снимков состояния симулированного сигнала. ang представляет входящие направления каждого сигнала плоской волны. Сигналы плоской волны являются сигналами принятого постоянным модуля со случайными фазами.
Симулируйте полученный сигнал в массиве и используйте данные, чтобы оценить направления прибытия.
Примечание: Этот пример запускается только в R2016b или позже. Если вы используете более ранний релиз, заменяете каждый вызов функции с эквивалентным step синтаксис. Например, замените myObject(x) с step(myObject,x).
Создайте универсальную линейную матрицу с 8 элементами, элементы которой расположены половина длины волны с интервалами независимо.
fc = 3e8; c = 3e8; lambda = c/fc; array = phased.ULA(8,lambda/2);
Симулируйте 100 снимков состояния полученного сигнала в массиве. Примите, что существует два сигнала, прибывающие из азимута 30 ° и 60 °, соответственно. Шум является белым через все элементы массива, и ОСШ составляет 10 дБ.
x = sensorsig(getElementPosition(array)/lambda,...
100,[30 60],db2pow(-10));Используйте beamscan пространственное средство оценки спектра, чтобы оценить направления прибытия, на основе симулированных данных.
estimator = phased.BeamscanEstimator('SensorArray',array,... 'PropagationSpeed',c,'OperatingFrequency',fc,... 'DOAOutputPort',true,'NumSignals',2); [~,ang_est] = estimator(x);
Постройте пространственный спектр, следующий из процесса оценки.
plotSpectrum(estimator)

График показывает peaks на уровне 30 ° и 60 °.
Симулируйте получение двух некоррелированых входящих сигналов, которые имеют различные уровни мощности. Вектор под названием scov хранит уровни мощности.
Создайте универсальную линейную матрицу с 8 элементами, элементы которой расположены половина длины волны с интервалами независимо.
fc = 3e8; c = 3e8; lambda = c/fc; ha = phased.ULA(8,lambda/2);
Симулируйте 100 снимков состояния полученного сигнала в массиве. Примите, что один входящий сигнал происходит из 30 азимутов степеней и имеет силу 3 Вт. Второй входящий сигнал происходит из 60 азимутов степеней и имеет силу 1 Вт. Два сигнала не коррелируются друг с другом. Шум является белым через все элементы массива, и ОСШ составляет 10 дБ.
ang = [30 60];
scov = [3 1];
x = sensorsig(getElementPosition(ha)/lambda,...
100,ang,db2pow(-10),scov);Используйте beamscan пространственное средство оценки спектра, чтобы оценить направления прибытия, на основе симулированных данных.
hdoa = phased.BeamscanEstimator('SensorArray',ha,... 'PropagationSpeed',c,'OperatingFrequency',fc,... 'DOAOutputPort',true,'NumSignals',2); [~,ang_est] = step(hdoa,x);
Постройте пространственный спектр, следующий из процесса оценки.
plotSpectrum(hdoa);

График показывает высокий пик в 30 градусах и более низкий пик в 60 градусах.
Симулируйте прием трех сигналов, два из которых коррелируются.
Создайте ковариационную матрицу сигнала, в которой первое и треть из трех сигналов коррелируются друг с другом.
scov = [1 0 0.6;... 0 2 0;... 0.6 0 1];
Симулируйте получение 100 снимков состояния трех входящих сигналов от 30 °, 40 °, и азимута на 60 °, соответственно. Массив, который получает сигналы, является универсальной линейной матрицей с 8 элементами, элементами которой является распределенная половина длины волны независимо. Шум является белым через все элементы массива, и ОСШ составляет 10 дБ.
pos = (0:7)*0.5; ns = 100; ang = [30 40 60]; ncov = db2pow(-10); x = sensorsig(pos,ns,ang,ncov,scov);
Симулируйте получение сигнала в URA. Сравните теоретическую ковариацию сигнала с ее выборочной ковариацией.
Создайте универсальную прямоугольную разрядку массивов 2 на 2 элементы 1/4-wavelength независимо.
pos = 0.25 * [0 0 0 0; -1 1 -1 1; -1 -1 1 1];
Задайте шумовую степень независимо для каждого из этих четырех элементов массива. Каждая запись в ncov шумовая степень элемента массива. Это положение элемента является соответствующим столбцом в pos. Примите, что шум является некоррелированым через элементы.
ncov = db2pow([-9 -10 -10 -11]);
Симулируйте 100 снимков состояния полученного сигнала в массиве и сохраните теоретические и эмпирические ковариационные матрицы. Примите, что один входящий сигнал происходит из азимута на 30 ° и вертикального изменения на 10 °. Второй входящий сигнал происходит из азимута на 50 ° и вертикального изменения на 0 °. Сигналы имеют силу 1 Вт и являются некоррелироваными.
ns = 100;
ang1 = [30; 10];
ang2 = [50; 0];
ang = [ang1, ang2];
rng default
[x,rt,r] = sensorsig(pos,ns,ang,ncov);Просмотрите величины теоретической ковариации и выборочной ковариации.
abs(rt)
ans = 4×4
2.1259 1.8181 1.9261 1.9754
1.8181 2.1000 1.5263 1.9261
1.9261 1.5263 2.1000 1.8181
1.9754 1.9261 1.8181 2.0794
abs(r)
ans = 4×4
2.2107 1.7961 2.0205 1.9813
1.7961 1.9858 1.5163 1.8384
2.0205 1.5163 2.1762 1.8072
1.9813 1.8384 1.8072 2.0000
Симулируйте получение сигнала в ULA, где шум между различными датчиками коррелируется.
Создайте универсальную линейную матрицу с 4 элементами, элементами которой является распределенная половина длины волны независимо.
pos = 0.5 * (0:3);
Задайте шумовую ковариационную матрицу. Значение в (k, _j _) положение в ncov матрица является ковариацией между k и j элементами массива, перечисленными в массиве.
ncov = 0.1 * [1 0.1 0 0; 0.1 1 0.1 0; 0 0.1 1 0.1; 0 0 0.1 1];
Симулируйте 100 снимков состояния полученного сигнала в массиве. Примите, что один входящий сигнал происходит из азимута на 60 °.
ns = 100; ang = 60; [x,rt,r] = sensorsig(pos,ns,ang,ncov);
Просмотрите теоретические матрицы и матрицы выборочной ковариации для полученного сигнала.
rt,r
rt = 4×4 complex
1.1000 + 0.0000i -0.9027 - 0.4086i 0.6661 + 0.7458i -0.3033 - 0.9529i
-0.9027 + 0.4086i 1.1000 + 0.0000i -0.9027 - 0.4086i 0.6661 + 0.7458i
0.6661 - 0.7458i -0.9027 + 0.4086i 1.1000 + 0.0000i -0.9027 - 0.4086i
-0.3033 + 0.9529i 0.6661 - 0.7458i -0.9027 + 0.4086i 1.1000 + 0.0000i
r = 4×4 complex
1.1059 + 0.0000i -0.8681 - 0.4116i 0.6550 + 0.7017i -0.3151 - 0.9363i
-0.8681 + 0.4116i 1.0037 + 0.0000i -0.8458 - 0.3456i 0.6578 + 0.6750i
0.6550 - 0.7017i -0.8458 + 0.3456i 1.0260 + 0.0000i -0.8775 - 0.3753i
-0.3151 + 0.9363i 0.6578 - 0.6750i -0.8775 + 0.3753i 1.0606 + 0.0000i
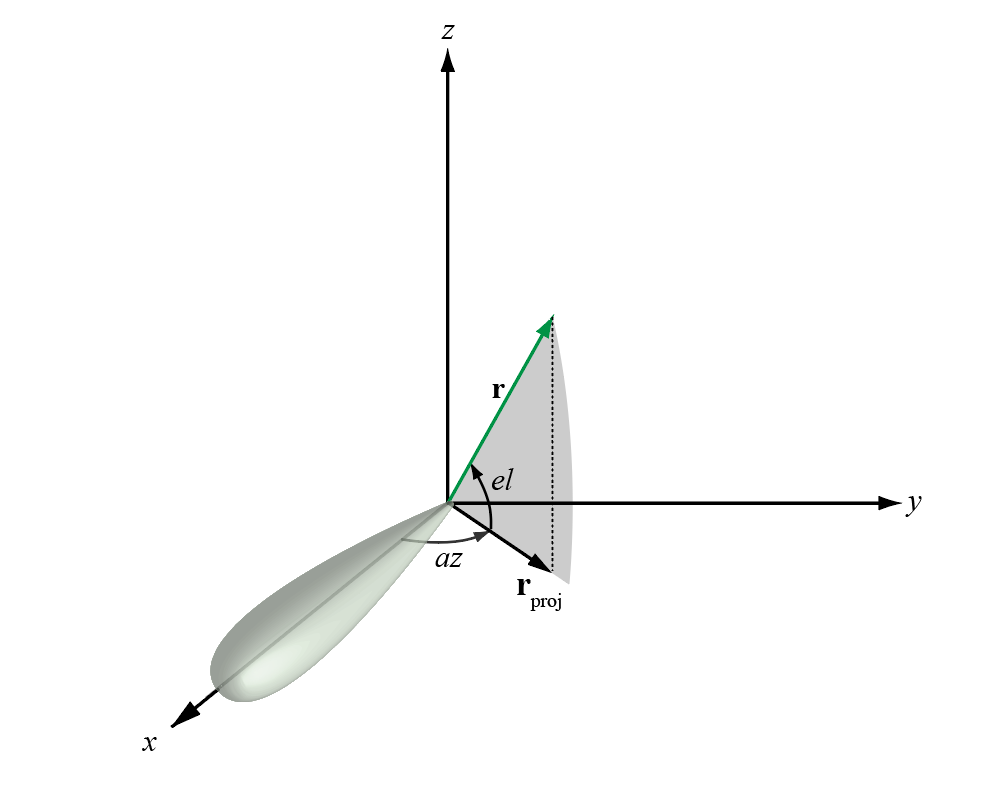
azimuth angle вектора является углом между x - ось и ортогональной проекцией вектора на плоскость xy. Угол положителен в движении от оси x к оси y. Углы азимута находятся между –180 и 180 градусами. elevation angle является углом между вектором и его ортогональной проекцией на xy - плоскость. Угол положителен при движении к положительному z - ось от плоскости xy. По умолчанию направление опорного направления элемента или массива выравнивается с положительным x - ось. Направление опорного направления является направлением основного лепестка элемента или массива.
Угол вертикального изменения иногда задается в литературе как угол, который вектор делает с положительным z - ось. MATLAB® и продукты Phased Array System Toolbox™ не используют это определение.
Этот рисунок иллюстрирует угол азимута и угол вертикального изменения для вектора, показавшего зеленой сплошной линией.