Источник давления на основе центробежного действия вращающегося рабочего колеса
Simscape / Жидкости / Тепловая Жидкость / Pumps & Motors

Блок Centrifugal Pump (TL) моделирует повышение давления, создаваемое в насосе центробежным действием подобного вентилятору ротора или рабочим колесом, связанным со спиральной полостью или улиткой. Насос параметрируется напором и тормозной мощностью, показатели производительности, которые часто изображаются в виде графика в технических таблицах данных как функции пропускной способности и скорости вала рабочего колеса. Эффекты, относящиеся к геометрии рабочего колеса, количество ступеней и тип спирали, среди других элементов дизайна насоса, приняты, чтобы быть отраженными в данных о производительности. Никакая определенная архитектура насоса или направление потока — осевой, радиальный, или смешанный — не приняты.
Вид сбоку типичного центробежного насоса
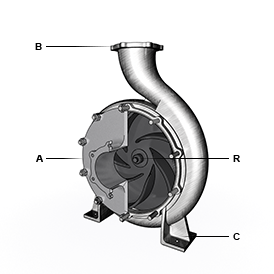
Насос приводится в действие внешним устройством — движущей силой, часто электрическим двигателем — который вращает вал рабочего колеса (порт R) против корпуса насоса (порт C). Рабочее колесо ускоряет поток, который оно получает от входа (порт А), направляя его через спираль (и, в некоторых случаях, диффузор потока). Когда это приближается к выходу (порт B), поток теряет скорость, вызывая повышение давления, как требуется физикой принципа Бернулли. Поток может на мгновение инвертировать направление, заставив порт А функционировать как выход и порт B как вход. Однако такие условия необычны и падают за пределами режима normal mode операции.
Насос генерирует поток, когда вал рабочего колеса вращают в конкретном направлении, определенном установкой параметров блоков Mechanical orientation. Если выбранной ориентацией является Positive, вращение вала рабочего колеса (в порте R) должно быть положительным относительно корпуса насоса (порт C). Если выбранной ориентацией является Negative, вращение вала рабочего колеса должно быть отрицательным. Никакая механическая передача не происходит, когда вал рабочего колеса вращают в противоречии с предписанным направлением; насос затем неактивен. Положительное направление потока — это сгенерировало во время нормального функционирования — всегда на порте A относительно порта B.
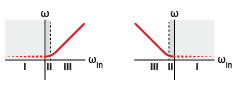
Скорость вала, полученная из порта R относительно порта C, переопределена в вычислениях блока, чтобы быть положительной каждый раз, когда его соответствия знака который предписанный параметрами блоков Mechanical orientation. Его значение также насыщается в более низком пороге, связанном только немного выше нуля. Насыщение гарантирует, что скорость вала не может инвертировать знак, событие, которое позволило бы насосу передавать степень, когда вращается в противоречии с ее механической ориентацией. Положительная пороговая скорость гарантирует, что сингулярность из-за деления на нуль не может произойти и таким образом заставить симуляцию перестать работать. Модифицированная скорость вала:
где ɷ является скоростью вала с индексом Th обозначение порогового значения и индекса In обозначая фактическое, или вход, значение; ε является механической ориентацией насоса, заданного как +1 если положительный и -1 если отрицательный, и λ определяет ширину области перехода, которая в свою очередь влияет на размер шага, взятый решателем в процессе моделирования. Обычно, чем шире область перехода, тем больше размер шага может быть, и быстрее, симуляция может прогрессировать. Параметр λ задан как:
Левый график строит модифицированную скорость вала против фактического значения, полученного в порте R относительно порта C для насоса с положительной механической ориентацией. Правильный график строит ту же скорость для насоса с отрицательной механической ориентацией. Область I соответствует полностью влажной скорости вала, область II к частично влажной скорости вала и области III к ненасыщенной скорости вала.
Данные о производительности позади параметризации насоса заданы в блоке в табличной форме. Существует две параметризации: 1D и 2D. 1D параметризация берет в данных по напору и тормозной мощности, каждый как функция пропускной способности в некоторых зафиксированных (или ссылка) скорость вала и плотность жидкости. 2D параметризация берет в данных по тем же переменным, но теперь как функции также скорости вала. Выбор параметризации установлен Pump parameterization параметры блоков.
Зависимость производительности насоса на скорости вала получена в обеих параметризации через законы подобия насоса — выражения, связывающие характеристики подобных насосов движущиеся жидкости различной плотности и с их рабочими колесами, запускающимися на различных скоростях. Законы утверждают, что скорость потока жидкости должна быть пропорциональна скорости вала, голове к квадрату скорости вала и приводной мощности к кубу скорости вала. Они применяются здесь к одному насосу, чтобы преобразовать напор и тормозную мощность на заданной ссылочной скорости в их собственные значения на фактической скорости вала.
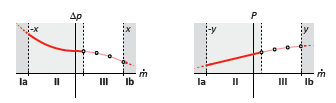
Данные о напоре и тормозной мощности расширены в 1D параметризации к отрицательным пропускным способностям. Расширение данных основано на регрессии кубического полинома для головы (область II из левого графика) и на линейной регрессии для приводной мощности (область II из правильного графика). Расширение ограничивается в отрицаемом значении верхней границы на сведенной в таблицу пропускной способности (-x в левом графике, -y в правильном графике). Никакое расширение данных не используется в 2D параметризации.
В областях значений табличных данных напор и тормозная мощность определяется линейной интерполяцией самых близких двух точек останова. За пределами областей значений данных (расширенный, в 1D параметризации), они определяются линейной экстраполяцией самой близкой точки останова. Экстраполяция ограничивается положительной пропускной способностью и скоростью вала в 2D параметризации. Симуляция за пределами областей значений табличных данных может уменьшить точность симуляции; где поддержано, это предназначается для обработки переходной динамики только.
Распространено в технических таблицах данных охарактеризовать производительность насоса с помощью в качестве переменных голову (длина) и пропускная способность (объемный расход). Параметризация насоса, обеспеченная в блоке, поэтому, на основе этих переменных. Тем не менее, тепловая жидкая область использует давление и массовый расход жидкости как через и через переменные, и блок должен поэтому преобразовать между двумя наборами переменных в его вычислениях.
Крышка насоса, данная в таблицах данных, обычно является общей динамической верхней частью насоса. Его значение является суммой статической головы давления, скоростной головы и головы вертикального изменения. По шкале статической верхней части давления типичного насоса обычно очень малы скорость и головы вертикального изменения, и их значения могут быть округлены до нуля. С этим предположением на месте, преобразованием между крышкой насоса и повышением давления от входа до выхода выражается как:
где ΔH является общим напором насоса, Δp является статическим повышением давления через насос, и ρ и g являются плотностью жидкости и гравитационным ускорением, соответственно. Преобразованием между пропускной способностью и массовым расходом жидкости дают:
где Q является пропускной способностью и массовый расход жидкости через насос.
Пропускная способность определяется в симулированных условиях работы из первого закона подобия насоса:
где ɷ является влажной скоростью вала. Индекс R обозначает ссылочное значение — или ссылочное условие, о котором сообщает производитель насоса или переменная производительности (здесь пропускная способность) полученный для тех условий. Выраженный в терминах мгновенного массового расхода жидкости и плотности жидкости, ссылочная пропускная способность становится:
Именно это значение пропускной способности используется во время операций интерполяционной таблицы, чтобы определить ссылочную крышку насоса и приводную мощность. В 2D параметризации мгновенная скорость вала заменяет ссылочную скорость вала в операциях интерполяционной таблицы и отношении уменьшает до 1, получение:
Крышка насоса определяется в симулированных условиях работы из второго закона подобия насоса:
В 1D параметризации ссылочная крышка насоса (ΔH R) является сведенной в таблицу функцией ссылочной пропускной способности:
В 2D параметризации это - сведенная в таблицу функция мгновенной пропускной способности и скорости вала:
Выражение ΔH как эквивалентное повышение давления и перегруппировка условий:
Отношение скорости вала уменьшает до 1 в 2D параметризации и вычислении становится:
Крутящий момент на вале рабочего колеса определяется в симулированных условиях работы из третьего закона подобия насоса:
где P является приводной мощностью. В 1D параметризации базовая мощность сопротивления (P R) является сведенной в таблицу функцией ссылочной пропускной способности:
В 2D параметризации это - сведенная в таблицу функция мгновенной пропускной способности и скорости вала:
Приводная мощность и крутящий момент вала связаны выражением:
где T является крутящим моментом. Выражение мгновенной приводной мощности в законе подобия насоса в терминах мгновенного крутящего момента вала и перегруппировки условий:
Отношение скорости вала уменьшает до 1 в 2D параметризации насоса и вычислении становится:
Механизированный труд, сделанный насосом, сопоставлен с энергетическим обменом. Управляющее энергетическое уравнение баланса:
где:
Φ A и Φ B является энергетическими скоростями потока жидкости в портах A и B, соответственно.
Механик P является механической энергией, произведенной должный закрутить, τ, и скорость вращения насоса, ω:
Гидравлическая мощность насоса является функцией перепада давлений между портами насоса:
Центробежные насосы являются типом насоса rotodynamic. В сочетании с насосами смещения они включают большинство использующихся в настоящее время насосов. Насосы Rotodynamic работают путем ускорения потока в "открытом'' отсеке — один никогда не отделяемый от портов — и использования части его кинетической энергии сгенерировать повышение давления при выходе. В отличие от этого, насосы смещения работают путем захвата управляемого объема жидкости в закрытом отсеке прежде, чем продвинуть его посредством выхода действием поршня, ныряльщика или другого механического интерфейса.
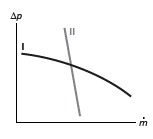
Насосы отличаются по своим показателям производительности. Скорость потока жидкости центробежного насоса падает быстро с изменением в голове между портами (изогнитесь I в фигуре). Это насоса прямого вытеснения варьируется мало (изогнитесь II). Эти характеристики предоставляют центробежные насосы приложениям, требующим почти постоянных насосов главного и прямого вытеснения к приложениям, требующим почти постоянной скорости потока жидкости. Центробежные насосы наиболее тесно напоминают источники постоянного давления; насосы прямого вытеснения наиболее тесно напоминают постоянные источники скорости потока жидкости.
Fixed-Displacement Pump (TL) | Variable-Displacement Pump (TL)
