Трение в гидравлических цилиндрах
Гидравлические цилиндры
Блок Cylinder Friction симулирует трение в контакте между движущимися контактирующими телами в гидравлических цилиндрах и предназначается, чтобы использоваться, в основном, в качестве базового блока в сочетании с обоими гидроцилиндры одно-и двустороннего действия, чтобы разработать модель гидроцилиндра с трением. Сила трения симулирована как функция относительной скорости и давления, и обобщает компоненты моделей Стрибека, Кулона и вязкого трения. Сила трения Кулона состоит из усилия предварительной нагрузки, вызванного сжатием уплотнения во время сборки и силой, пропорциональной давлению. Сумма сил трения Кулона и Стрибека при нулевой скорости часто упоминается как сила трения страгивания. Для получения дополнительной информации смотрите страницу с описанием блока Translational Friction.
Сила трения аппроксимирована следующими уравнениями:
где
| F | Сила трения |
| ФК | Трение Кулона |
| PR F | Усилие предварительной нагрузки |
| f cfr | Коэффициент трения Кулона |
| p A, p B | Давления в полостях цилиндра |
| Кирпич K | Коэффициент увеличения силы трения страгивания |
| c v | Коэффициент перехода |
| v | Относительная скорость в контакте |
| VFR f | Коэффициент вязкого трения |
Чтобы избежать разрыва в v = 0, небольшая область |v | ≤ v th введена вокруг нулевой скорости, где сила трения принята, чтобы быть линейно пропорциональной скорости:
где
| K | Коэффициент пропорциональности |
| v th | Скоростной порог |
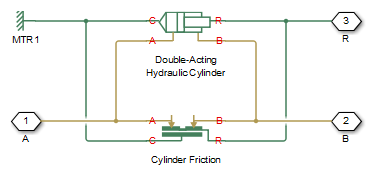
Связи R и C являются портами механической передачи, сопоставленными со стержнем и случаем, соответственно. Связи A и B являются гидравлическими портами, которые будут соединены с портами А и B модели гидроцилиндра, как показано на следующем рисунке. Сила, сгенерированная блоком всегда, выступает против относительного движения между стержнем и случаем.
Усилие предварительной нагрузки, вызванное сжатием уплотнения во время сборки. Значением по умолчанию является 10 N.
Коэффициент трения Кулона, который задает пропорциональность между силой трения Кулона и давлением в полостях цилиндра. Значением по умолчанию является 1e-6 N/Pa.
Сила трения увеличивается по трению Кулона. Сила трения Кулона, умноженная на этот коэффициент, упоминается как сила трения страгивания. Значением по умолчанию является 1.
Коэффициент пропорциональности между вязкой силой трения и относительной скоростью. Значение параметров должно быть больше или быть равным нулю. Значением по умолчанию является 100 N/(m/s).
Параметр устанавливает значение коэффициента c v, который используется в сглаживании перехода между трением страгивания и трением Кулона. Его значение присвоено на основе следующих факторов: компонент трения Страйбека достигает приблизительно 5% своего установившегося значения при скорости 3/cv, и 2% при скорости 4/cv, который позволяет вывести отношение c v ~ = 4/vmin, где min v является относительной скоростью, при которой сила трения имеет свое минимальное значение. По умолчанию c v установлен в 10 s/m, который соответствует минимальному трению при скорости приблизительно 0.4 m/s.
Параметр устанавливает малый диапазон около нулевой скорости, в которой сила трения считается линейно пропорциональной относительной скорости. MathWorks рекомендует, чтобы вы использовали значения в области значений между 1e-6 и 1e-4 m/s. Значением по умолчанию является 1e-4 m/s.
Используйте вкладку Variables, чтобы установить приоритет и начальные целевые значения для переменных в блоках до симуляции. Для получения дополнительной информации смотрите Приоритет Набора и Начальную Цель для Переменных в блоках (Simscape).
Блок имеет следующие порты:
AГидравлический порт, соединенный с входным отверстием цилиндра.
BГидравлический порт соединения с выходным отверстием цилиндра.
RПорт Механического привода сопоставлен со штоком гидроцилиндра.
CПорт механического привода, связанный с корпусом цилиндра.
Double-Acting Hydraulic Cylinder | Single-Acting Hydraulic Cylinder
