Гидравлическая сила порождающего привода в одном направлении
Гидравлические цилиндры

Блок Single-Acting Hydraulic Cylinder моделирует устройство, которое преобразует энергию жидкости в механическую энергию движения перемещения. Гидравлическая жидкость, подаваемая под давлением в полость цилиндра, воздействует на поршень, чтобы переместить с некоторой силой шток гидроцилиндра. Цилиндры одностороннего действия передают силу и движение в одном направлении только. Используйте внешнее устройство, такое как пружина, вес, или другой противоположный установленный цилиндр, чтобы переместить стержень в противоположное направление.
Модель гидроцилиндра составлена из блоков библиотеки Simscape™ Foundation. Принципиальная схема модели представлена ниже.
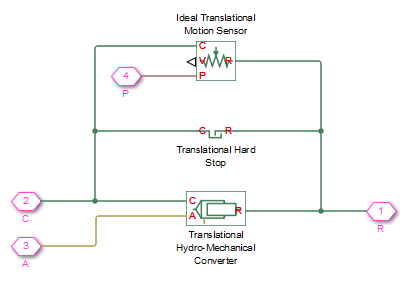
Связи R и C являются портами механического привода, соответствующими штоку гидроцилиндра и корпусу гидроцилиндра, соответственно. Связь A является гидравлическим портом, сопоставленным с входным отверстием в гидроцилиндр. Выходной порт физического сигнала P обеспечивает перемещение штока, рассчитанным следующим образом:
x PST = x 0 + x p
где
| x PST | Смещение стержня выводится портом физического сигнала |
| x0 | Начальное расстояние между поршнем и дном |
| x p | Смещение стержня относительно его исходного положения |
Энергия через порт А направлена к блоку Translational Hydro-Mechanical Converter. Конвертер преобразовывает энергию жидкости в механическую энергию и рассчитывает сжимаемость жидкости в полости цилиндра. Движение стержня ограничивается с механическим блоком Translational Hard Stop таким способом, которым стержень может переместиться только между упорами гидроцилиндра. Положение поршня передается порту P физического сигнала.
Направление блока является корректируемым и может управляться параметром Cylinder orientation.
Никакая утечка, внутренняя или внешняя, не учтена.
Никакая загрузка на поршневой стержень, такой как инерция, трение, пружина, и так далее, не учтена. При необходимости можно легко добавить их путем соединения соответствующего базового блока с цилиндрическим портом R.
Эффективная площадь базового поршня. Значением по умолчанию является 0.001 м^2.
Максимальное перемещение поршня между крайними положениями. Значением по умолчанию является 0.1 m.
Расстояние между поршнем и крайнем положением в начале моделирования. Это значение не может превысить величину хода поршня. Значение по умолчанию 0, который соответствует полностью сложенному положению.
Объем жидкости в полости при достижении поршнем крайнего положения. Значением по умолчанию является 1e-4 м^3.
Давление в полости цилиндра в начале моделирования. Значение по умолчанию 0.
Коэффициент удельной теплоемкости для блока Емкости Гидравлического Поршня. Значением по умолчанию является 1.4.
Определяет свойства упругости сталкивающихся тел для блока Translational Hard Stop. Чем больше значение параметра, тем меньше тела проникают друг в друга, более твердое, которым становится удар. Меньшее значение параметра вступает в контакт мягче, но обычно улучшает сходимость и вычислительный КПД. Значением по умолчанию является 1e6 N/m.
Задает свойство демпфирования сталкивающихся тел для блока Translational Hard Stop. При нулевом демпфировании столкновение близко к абсолютно упругому. Чем больше значение параметра, тем больше энергии рассеивается во время взаимодействия. Следует иметь в виду, что демпфирование влияет на движение поршня, пока он находится в контакте с ограничителем, включая период, когда ползун выходит из контакта. По причинам вычислительной эффективности и сходимости MathWorks рекомендует, присвоить ненулевое значение этому параметру. Значение по умолчанию является 150 Н*с/м.
Методы моделирования для жестких упоров. Опции включают:
Stiffness and damping applied smoothly through transition region (значение по умолчанию) — Масштаб силы контакта от нуля до ее полного значения на заданной длине. Масштабирование является полиномом по своей природе. Функция масштабирования полинома численно является гладкой, и она не производит нулевых пересечений любого вида.
Full stiffness and damping applied at bounds, undamped rebound — Примените полное значение вычисленной силы контакта при нарушении жесткого упора. Сила контакта является соединением упругих и демпфирующих сил во время проникновения и упругой силы — без демпфирующей составляющей — во время восстановления. Никакое сглаживание не применяется.
Full stiffness and damping applied at bounds, damped rebound — Примените полное значение вычисленной силы контакта при нарушении жесткого упора. Сила контакта является соединением упругих и демпфирующих сил и во время проникновения и во время восстановления. Никакое сглаживание не применяется. Это - модель жесткого упора, используемая в предыдущих релизах.
Расстояние, ниже которого масштабирование применяется к силе жесткого упора. Сила контакта является нулем, когда расстояние до жесткого упора равно значению, заданному здесь. Это в его полном значении, когда расстояние до жесткого упора является нулем. Значение по умолчанию 1 mm..
Задает ориентацию гидроцилиндра относительно глобального положительного направления. Цилиндр может быть установлен двумя различными способами, в зависимости от того, порождает ли он силу в положительном или в отрицательном направлении при подаче давления на вход. Если давление, приложенное к порту А, порождает силу в отрицательном направлении, установите параметр на Acts in negative direction. Значением по умолчанию является Acts in positive direction.
Параметр, определенный типом рабочей жидкости:
Fluid bulk modulus
Используйте блок Hydraulic Fluid или блок Custom Hydraulic Fluid, чтобы определить свойства жидкости.
Блок имеет следующие порты:
AГидравлический порт, сопоставленный с входным отверстием гидроцилиндра.
RПорт Механического привода сопоставлен со штоком гидроцилиндра.
CПорт механического привода, связанный с корпусом цилиндра.
PПорт выходного физического сигнала на конце штока гидроцилиндра.
Double-Acting Hydraulic Cylinder | Ideal Translational Motion Sensor | Single-Acting Hydraulic Cylinder (Simple) | Translational Hard Stop | Translational Hydro-Mechanical Converter
