Открытое окно Kinematics Solver Viewer, чтобы визуализировать решение KinematicsSolver
viewSolution( открывает окно Kinematics Solver Viewer, чтобы визуализировать механизм, соответствующий последнему решению, вычисленному ks)solve функция для KinematicsSolver объект ks.
Ошибка происходит если solve функция не была вызвана прежде, чем вызвать viewSolution функция.
Если statusFlag соответствие последней возможности решить-3, состояние, возвращенное решателем, не кинематическим образом выполнимо. В этом случае механизм, представленный в средстве просмотра, не физически осуществим.
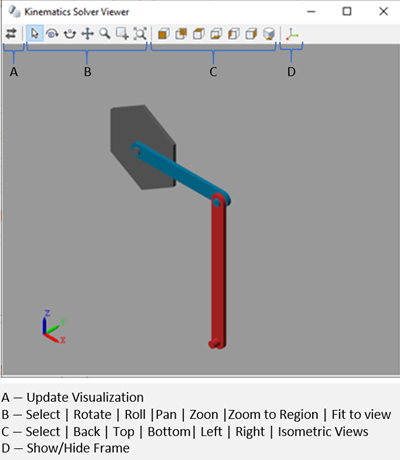
Окно Kinematics Solver Viewer показывают в следующем рисунке. Эта панель обеспечивает визуальную обратную связь на механизме, который вы анализируете. Нажмите кнопку Update Visualization![]() или нажмите F5, чтобы просмотреть механизм, который соответствует последнему решению
или нажмите F5, чтобы просмотреть механизм, который соответствует последнему решению ks. Используйте средство просмотра, чтобы исследовать механизм с разных точек зрения путем выбора стандартного представления или путем вращения, панорамируя и масштабируя механизм. Щелкните правой кнопкой по окну, чтобы получить доступ к контекстно-зависимому меню. Это меню предоставляет дополнительные возможности, которые позволяют вам изменять цвет фона, разделять окно визуализации в несколько мозаик и изменять вид представления на установке +Z up (XY Top) по умолчанию.
Окно средства просмотра решателя кинематики
Создайте объект KinematicsSolver для sm_double_pendulum модели.
mdl = 'sm_double_pendulum';
open_system(mdl);
ks = simscape.multibody.KinematicsSolver(mdl);
Перечислите все объединенные переменные положения.
jointPositionVariables(ks)
ans =
2×4 table
ID JointType BlockPath Unit
_________ ________________ ___________________________________ _____
"j1.Rz.q" "Revolute Joint" "sm_double_pendulum/Lower Revolute" "deg"
"j2.Rz.q" "Revolute Joint" "sm_double_pendulum/Upper Revolute" "deg"Присвойте верхние и более низкие углы шарнирного соединения как целевые переменные.
targetIDs = ["j1.Rz.q";"j2.Rz.q"]; addTargetVariables(ks,targetIDs);
Решите прямую задачу кинематики с данными углами поворота шарнира.
targets = [90,0]; outputVec = solve(ks,targets);
Откройте средство просмотра решателя кинематики.
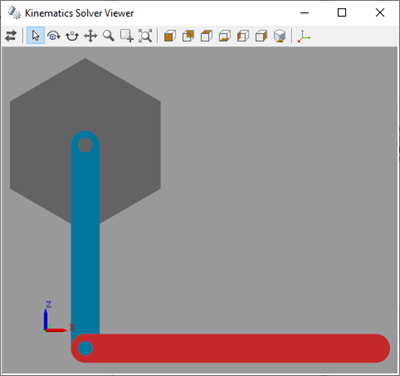
viewSolution(ks);
Нажмите кнопку Front view, чтобы просмотреть решение.
Закройте средство просмотра.
closeViewer(ks);
