Реализуйте ориентированные на поле модели контроллеров на основе косвенного или стратегии управления вектора feedforward
Simscape / Электрический / Специализированные Энергосистемы / Электроприводы / Основные Блоки Диска
Блок Field-Oriented Controller делает AC, основанный на машине диск ведет себя как DC основанный на машине диск в терминах управления крутящим моментом и потоком независимо. Для объяснения смотрите Ориентированное на поток Управление.
Ориентированные на поле Модели контроллеров имеют два рабочих режима. Это генерирует импульсы или для инвертора подробного или для среднего значения.
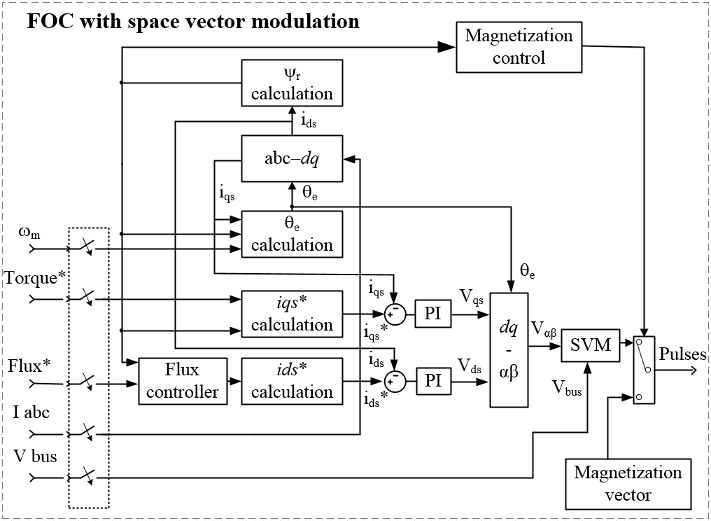
В подробном режиме блок Field-Oriented Controller имеет два типа модуляции: гистерезисная модуляция и модуляция вектора пробела (SVM). Рисунок показывает управление, схематичное для двух типов модуляции.
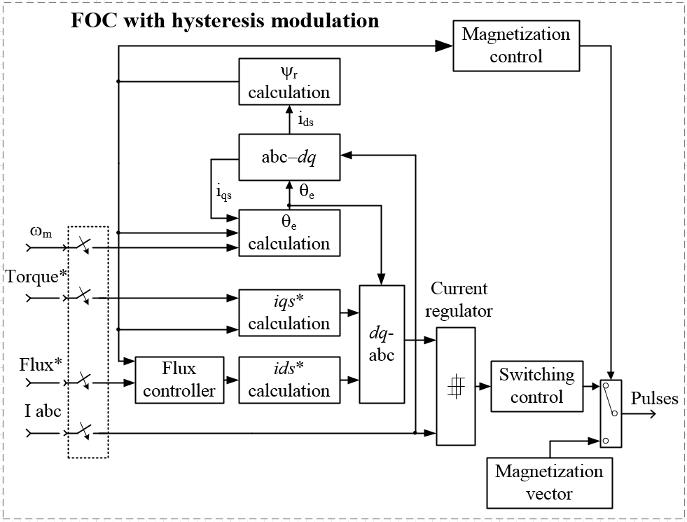
Блок ψr calculation оценивает поток ротора двигателя. Это вычисление основано на моторном синтезе уравнения.
Блок Θe calculation находит угол фазы поля вращения потока ротора.
Блок abc-dq выполняет преобразование переменных фазы abc на dq компоненты потока ротора, вращающего систему координат ссылки поля.
Блок iqs* calculation использует расчетный поток ротора и ссылку крутящего момента, чтобы вычислить статор текущий квадратурный компонент, требуемый произвести электромагнитный крутящий момент на вале двигателя.
Блок ids* calculation использует ссылку потока ротора, чтобы вычислить статор текущий прямой компонент, требуемый произвести поток ротора в машине.
Контроллер потока управляет динамикой потока и уменьшает установившуюся ошибку потока.
Модуль вектора намагничивания содержит вектор, используемый, чтобы создать моторный начальный поток.
Блок управления намагничивания содержит логику для переключения между режимами намагничивания и нормального функционирования.
Текущий регулятор является скорострельным оружием текущий контроллер с корректируемой гистерезисной пропускной способностью.
Блок dqabc выполняет преобразование расчетных Идентификаторов значений* и IQ* в токи ссылки фазы abc. Фактические значения abc текущие компоненты отслеживают ссылочные токи в гистерезисной пропускной способности.
Переключающийся блок управления ограничивает частоту коммутации инвертора максимальным значением.
Блоки PI являются пропорционально-интегральными регуляторами. Расчетные IQ значений* и Идентификаторы* сравниваются с фактическими значениями текущих IQ компонентов и Идентификаторов, соответственно и текущие ошибки питаются ПИ-контроллеры, которые генерируют компоненты напряжения статора, которыми управляют, Vqs и Vds, соответственно.
Блок dq \U 03B1\\U 03B2\преобразует напряжение статора, которым управляют, от вращения dq координаты в стационарные координаты αβ с помощью угла фазы поля вращения потока ротора.
Блок Space Vector Modulator получает полученный вектор напряжения Vαβ и генерирует соответствующий вектор состояний переключения для управления устройств переключения инвертора.
Модуль SVM содержит четыре основных блока:
Блок Sector Selector используется, чтобы найти сектор αβ плоскости, в которой находится вектор напряжения. αβ плоскость разделена на шесть различных секторов, расположенных с интервалами 60 градусами.
Блок Ramp Calculator используется, чтобы произвести унитарный пандус в PWM переключающаяся частота. Этот пандус используется в качестве основы времени для переключающейся последовательности.
Блок Switching Time Calculator используется, чтобы вычислить, синхронизация вектора напряжения применилась к двигателю. Вход блока является сектором, в котором находится вектор напряжения.
Блок The Gates Logic получает последовательность синхронизации от блока Switching Time Calculator и пандус от блока Ramp Calculator. Этот блок сравнивает пандус и сигналы синхронизации логического элемента активировать переключатели инвертора в свое время.
В среднем режиме не представлены высокочастотные действия переключения выключателей питания.
Средний режим похож на подробный режим с гистерезисной модуляцией за исключением того, что нет никакого блока switching control, и импульсы, сгенерированные текущим регулятором, являются трехуровневыми сигналами (-1, 0, 1) указание, применяет ли инвертор среднего значения отрицание, нуль или положительное напряжение на шине DC (Vdc) к машине во время насыщения инвертора. В подробном режиме блок Field Oriented Controller выводит фактические импульсы для переключателей инвертора.
Задайте уровень детализации модели, чтобы использовать:
Detailed (значение по умолчанию)
Average
Выберите гистерезис или модуляцию вектора пробела. Значением по умолчанию является Hysteresis.
Контроллер потока пропорциональное усиление. Значением по умолчанию является 100.
Контроллер потока интегральное усиление. Значением по умолчанию является 30.
Первый порядок оценки потока фильтрует частоту среза в герц. Значением по умолчанию является 16.
Контроллер потока максимальный отрицательный и положительный выход, в webers. Значением по умолчанию является [-2,2].
Время выборки контроллера, в секундах. Время выборки должно быть кратным шагу времени симуляции. Значением по умолчанию является 20e-6.
Временной шаг The используется в симуляции в секундах. Значением по умолчанию является 2e-6.
Текущая пропускная способность гистерезиса регулятора, в амперах. Это значение является общей гистерезисной пропускной способностью, распределенной симметрично вокруг текущего сетбола. Рисунок показывает случай, где текущий сетбол*, и текущая гистерезисная ширина полосы регулятора установлена в дуплекс.
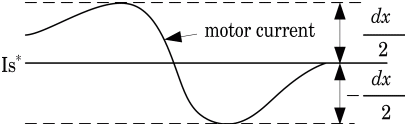
Этот параметр доступен только, когда параметр Model detail level устанавливается на Detailed. Значением по умолчанию является 10.
Максимальная частота переключения инвертора, в герц. Этот параметр доступен только, когда параметр Model detail level устанавливается на Detailed. Значением по умолчанию является 20000.
Частота среза фильтра lowpass первого порядка применилась к измерению напряжения на шине DC в герц. Этот параметр включен только в подробном режиме с выбранным SVM. Значением по умолчанию является 50.
Фиксированная частота переключения инвертора, в герц. Этот параметр включен только, когда параметр Model detail level устанавливается на Detailed и Modulation type установлен в SVM. Значением по умолчанию является 20000.
D-ось текущий регулятор пропорциональное усиление. Этот параметр включен только, когда параметр Model detail level устанавливается на Detailed и Modulation type установлен в SVM. Значением по умолчанию является 5.
D-ось текущее усиление интеграла регулятора. Этот параметр включен только, когда параметр Model detail level устанавливается на Detailed и Modulation type установлен в SVM. Значением по умолчанию является 100.
Q-ось текущий регулятор пропорциональное усиление. Этот параметр включен только, когда параметр Model detail level устанавливается на Detailed и Modulation type установлен в SVM. Значением по умолчанию является 5.
Q-ось текущее усиление интеграла регулятора. Этот параметр включен только, когда параметр Model detail level устанавливается на Detailed и Modulation type установлен в SVM. Значением по умолчанию является 100.
Сопротивление ротора упомянуло статор в Омах. Значением по умолчанию является 9.295e-3.
Индуктивность утечки ротора упомянула статор в henry. Значением по умолчанию является 0.3027e-3.
Индуктивность намагничивания, в henry. Значением по умолчанию является 10.46e-3.
Количество пар полюса. Значением по умолчанию является 2.
Начальный поток для машины, в webers. Значением по умолчанию является 0.73.
Torque*Ссылка крутящего момента, обычно обеспеченная контроллером скорости.
Flux*Ссылка потока, обычно обеспеченная контроллером скорости.
wmМеханическая угловая скорость машины индукции.
I_ABCТри тока линии машины индукции.
MagCЭтот двоичный сигнал указывает, намагничена ли машина достаточно, чтобы быть запущенной (1) или не (0).
ThetaУгол фазы потока ротора.
sig*Вектор, содержащий сигналы измерения:
Vmode — Логическое значение, указывающее, является ли режим намагничиванием (1) или нормальное функционирование (0).
we — Электрическая угловая скорость потока ротора.
iabc* — Три ссылочных тока.
pulses* — Два трехуровневых сигнала (-1, 0, 1) указание, если инвертор среднего значения применяет отрицание, нуль или положительное напряжение на шине DC (Vdc) к машине.
Этот выход отображается только, когда параметр Model detail level устанавливается на Average.
GatesИмпульсы для шести переключателей инвертора. Этот выход отображается только, когда параметр Model detail level устанавливается на Detailed.
Блок Field-Oriented Controller используется в блоке AC3 библиотеки Electric Drives.
[1] Bose, B. K. Современная силовая электроника и диски AC, NJ: Prentice Hall, 2002.
Bridge Firing Unit (AC) | Bridge Firing Unit (DC) | Current Controller (Brushless DC) | Current Controller (DC) | Direct Torque Controller | Regulation Switch | Six-Step Generator | Space Vector Modulator | Speed Controller (AC) | Speed Controller (DC) | Speed Controller (Scalar Control) | Vector Controller (PMSM) | Vector Controller (WFSM) | Voltage Controller (DC Bus)
