Индуктивный датчик положения ротора с четырьмя индуктивными обмотками
Simscape / Электрический / Sensors & Transducers
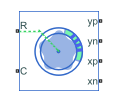
Блок Inductive Rotor Position Sensor использует теорию вихря текущие потери, чтобы получить положение ротора. Это состоит из четырех плоских обмоток и целевой трассировки, которые обнаруживают положение ротора. Целевая трассировка формируется синусоидальным способом и делается из проводящего материала. Расстояние между четырьмя плоскими обмотками эквивалентно 90 градусам одного цикла.
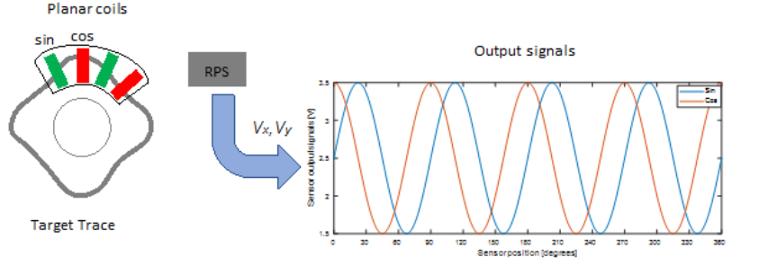
Напряжения между элементами датчика описаны уравнениями:
где:
vx является напряжением косинуса.
vy является напряжением синуса.
Ax и Ay являются амплитудами напряжения для x и осей y, которые отражают несоответствие чувствительности.
Vx0 и Vy0 являются смещениями напряжения для осей y и x.
N является количеством пар полюса.
θ является механическим положением.
β является квадратурной ошибкой.
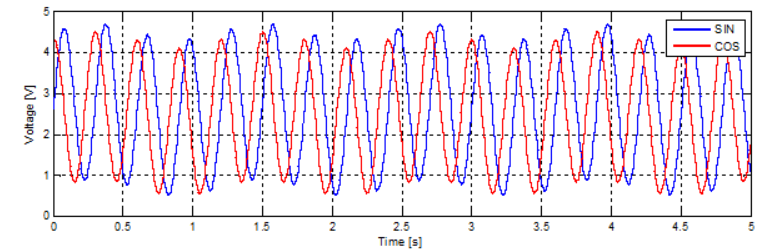
K является падающим фактором.
Блок использует это уравнение, чтобы декодировать угол:
Этот рисунок показывает эффекты падающего фактора:
Используйте настройки Variables, чтобы задать приоритет и начальные целевые значения для переменных в блоках перед симуляцией. Для получения дополнительной информации смотрите Приоритет Набора и Начальную Цель для Переменных в блоках (Simscape).
