Характеристики скорости крутящего момента ротационного пьезоэлектрического двигателя волны перемещения
Simscape / Электрический / Электромеханический / Мехатронные Приводы
Блок Piezo Rotary Actuator представляет характеристики скорости крутящего момента пьезоэлектрического двигателя волны перемещения. Блок представляет отношение скорости крутящего момента двигателя на уровне, который подходит для моделирования уровня системы. Чтобы симулировать двигатель, блок использует следующие модели:
Двигатель не приводится в действие, когда вход v физического сигнала является нулем. Это соответствует применению нулевых вольт RMS к двигателю. В этом сценарии блок моделирует двигатель с помощью следующих элементов:
Инерция, значение которой является значением параметров Rotor inertia.
Трение, характеристики которого определяются значениями параметров во вкладке Motor-Off Friction.
Блок использует блок Simscape™Rotational Friction, чтобы смоделировать компонент трения. Для получения дальнейшей информации о модели трения, смотрите страницу с описанием блока Rotational Friction.
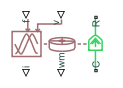
Когда двигатель активен, блок Piezo Rotary Actuator представляет моторные характеристики с помощью следующей модели эквивалентной схемы.
В предыдущей фигуре:
Источник напряжения переменного тока представляет вход физического сигнала блока частоты f и величина v.
Резистор R обеспечивает основной электрический и механический срок затухания.
Индуктор L представляет инерцию вибрации ротора.
Конденсатор C представляет piezo кристаллическую жесткость.
Конденсаторное CP представляет емкость фазы. Это - электрическая емкость, сопоставленная с каждой из двух моторных фаз.
Крутящий момент постоянный kt связывает RMS текущий i с получившимся механическим крутящим моментом.
Квадратичный срок затухания механического устройства, λωm 2, формирует кривую скорости крутящего момента преимущественно на скоростях близко к максимальному об/мин. ωm является скоростью вращательного механического устройства.
Термин представляет инерцию ротора.
При инициализации модели блок вычисляет параметры модели R, L, C, kt и λ, чтобы гарантировать, что установившаяся кривая скорости крутящего момента совпадает со значениями следующих заданных пользователями значений параметров:
Rated torque
Rated rotational speed
No-load maximum rotational speed
Maximum torque
Эти значения параметров заданы для Rated RMS voltage и Motor natural frequency (или расчетная частота) значения параметров.
Квадратичный срок затухания механического устройства производит квадратичную кривую скорости крутящего момента. Пьезоэлектрические моторные кривые скорости крутящего момента могут обычно аппроксимироваться более точно с помощью квадратичной функции, чем линейная, потому что градиент скорости крутящего момента становится более крутым, когда двигатель приближается к максимальной скорости.
Если инерция ротора, J не задан на таблице данных, можно выбрать значение, которое предоставляет хорошее соответствие заключенному в кавычки времени отклика. Время отклика часто задается как время для ротора, чтобы достигнуть максимальной скорости при запуске с отдыха при условиях без загрузок.
Добротность, что вы задаете использование параметра Resonance quality factor, относится к параметрам модели эквивалентной схемы можно следующим образом:
Этот термин обычно не обеспечивается на таблице данных. Можно вычислить его значение путем соответствия с чувствительностью крутящего момента к ведущей частоте.
Чтобы инвертировать моторное направление операции, сделайте вход v физического сигнала отрицательным.
Когда двигатель приводится в действие, модель допустима только между нулевой и максимальной скоростью по следующим причинам:
Таблицы данных не предоставляют информацию для операции за пределами нормальной области значений.
Пьезоэлектрические двигатели не спроектированы, чтобы действовать в приводимом в действие торможении и генерации областей.
Блок ведет себя можно следующим образом за пределами допустимой операционной области:
Скорость ниже нуля, модель обеспечивает постоянный крутящий момент, который является нулевым значением крутящего момента об/мин. Нулевое значение крутящего момента об/мин является значением параметров Maximum torque, если входное напряжение RMS равняется значению параметров Rated RMS voltage, и вход частоты равняется значению параметров Motor natural frequency.
Выше максимальной скорости модель производит отрицательный крутящий момент, предсказанный моделью эквивалентной схемы, но ограничивает абсолютное значение крутящего момента к крутящему моменту максимума нулевой скорости.
Характеристики скорости крутящего момента являются самыми представительными при работе моделью близко к номинальному напряжению и резонансной частоте.
