Дискретное время или непрерывное время синхронная машина система возбуждения DC2C включая автоматический регулятор напряжения и возбудитель
Simscape / Электрический / Управление / Управление SM
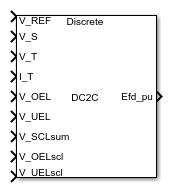
Блок SM DC2C моделирует синхронную систему возбуждения типа DC2C машины, которая соответствует IEEE 421.5-2016 [1].
Используйте этот блок, чтобы смоделировать управление и регулирование полевого напряжения синхронной машины, которая действует в качестве генератора с помощью возбудителя вращения коммутатора DC.
Можно переключиться между непрерывными и дискретными реализациями блока при помощи параметра Sample time (-1 for inherited). Чтобы сконфигурировать интегратор в течение непрерывного времени, установите свойство Sample time (-1 for inherited) на 0. Чтобы сконфигурировать интегратор в течение дискретного времени, установите свойство Sample time (-1 for inherited) на положительное, ненулевое значение, или на -1 наследовать шаг расчета от восходящего блока.
Блок SM DC2C составлен из четырех главных компонентов:
Текущий компенсатор изменяет измеренное терминальное напряжение как функцию терминального тока.
Преобразователь измерения напряжения симулирует динамику терминального преобразователя напряжения при помощи фильтра lowpass.
Компонент элементов управления возбуждения сравнивает преобразователь напряжения выход с терминальной ссылкой напряжения, чтобы произвести ошибку напряжения. Эта ошибка напряжения затем передается через регулятор напряжения, чтобы произвести полевое напряжение возбудителя.
DC, вращающий возбудитель, моделирует возбудитель вращения коммутатора DC и производит полевое напряжение, которое применяется к управляемой синхронной машине. Блок также кормит полевым напряжением назад систему возбуждения.
Эта схема показывает полную структуру системной модели возбуждения DC2C:
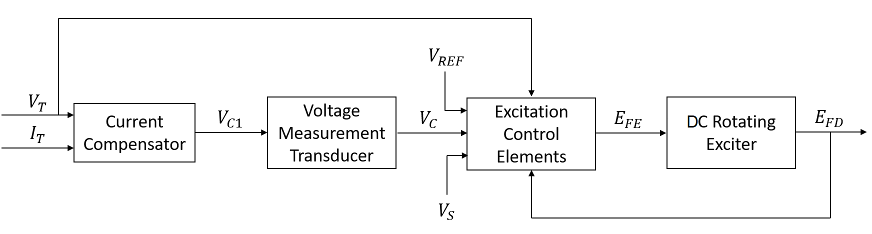
В схеме:
VT и IT являются измеренным терминальным напряжением и текущий из синхронной машины.
VC1 является компенсированным текущим образом терминальным напряжением.
VC является отфильтрованным, компенсированным текущим образом терминальным напряжением.
VREF является ссылочным терминальным напряжением.
VS является напряжением стабилизатора энергосистемы.
EFE является полевым напряжением возбудителя.
EFD является полевым напряжением.
Следующие разделы описывают каждую из больших частей блока подробно.
Текущий компенсатор моделируется как:
где:
RC является сопротивлением компенсации загрузки.
XC является реактивным сопротивлением компенсации загрузки.
Преобразователь измерения напряжения реализован как блок Low-Pass Filter с постоянной времени TR. Обратитесь к документации для этого блока для точных дискретных и непрерывных реализаций.
Эта схема иллюстрирует полную структуру элементов управления возбуждения:
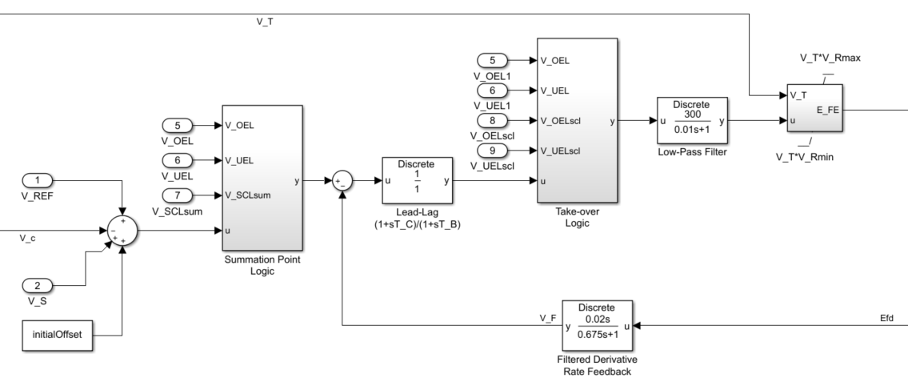
В схеме:
Подсистема Логики Точки Суммирования моделирует входное местоположение точки суммирования для ограничителя перевозбуждения (OEL), ограничителя недовозбуждения (UEL) и напряжений статора текущего ограничителя (SCL). Для получения дополнительной информации об использовании ограничителей с этим блоком смотрите Поле Текущие Ограничители.
Модели блока Lead-Lag дополнительная динамика сопоставлены с регулятором напряжения. Здесь, TC является постоянным временем выполнения заказа, и TB является постоянным временем задержки. Обратитесь к документации блока Lead-Lag для точных дискретных и непрерывных реализаций.
Блок Low-Pass Filter моделирует главную динамику регулятора напряжения. Здесь, KA является усилением регулятора, и TA является главной постоянной времени регулятора. Минимальными и максимальными антизаключительными пределами насыщения для блока является VRmin и VRmax, соответственно.
Подсистема Логики Поглощения моделирует входное местоположение точки поглощения для OEL, UEL и напряжений SCL. Для получения дополнительной информации об использовании ограничителей с этим блоком смотрите Поле Текущие Ограничители.
Блок Filtered Derivative моделирует путь к обратной связи уровня для стабилизации системы возбуждения. Здесь, KF и TF являются усилением и постоянной времени этой системы, соответственно. Обратитесь к документации для блока Filtered Derivative для точных дискретных и непрерывных реализаций.
VT*VRmax и VT*VRmin являются минимальными и максимальными пределами насыщения для выходного полевого напряжения возбудителя EFE.
Можно использовать различное поле текущие ограничители, чтобы изменить выход регулятора напряжения под небезопасными условиями работы:
Используйте ограничитель перевозбуждения, чтобы предотвратить перегрев обмотки возбуждения из-за чрезмерной полевой текущей потребности.
Используйте ограничитель недовозбуждения, чтобы повысить полевое возбуждение, когда это слишком низко, который может рискнуть десинхронизацией.
Используйте статор текущий ограничитель, чтобы предотвратить перегрев обмоток статора из-за сверхтоков.
Присоедините выход любого из этих ограничителей в одной из этих точек:
Точка суммирования как часть обратной связи автоматического регулятора напряжения (AVR)
Точка поглощения, чтобы заменить обычное поведение AVR
Если вы используете статор текущий ограничитель в точке суммирования, используйте один вход VSCLsum. Если вы используете статор текущий ограничитель в точке поглощения, используйте и вход VOELscl перевозбуждения и вход VUELscl недовозбуждения.
Эта схема иллюстрирует полную структуру возбудителя вращения коммутатора DC:
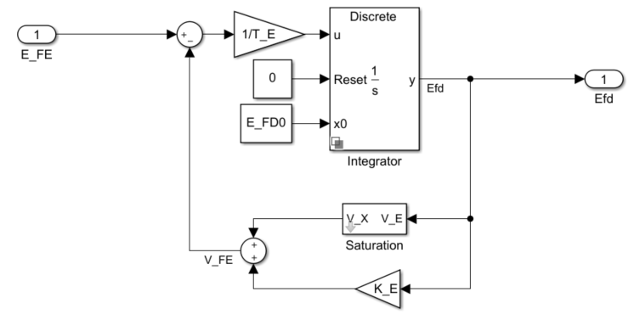
В схеме:
Поле возбудителя текущий VFE моделируется как суммирование двух сигналов:
Нелинейные функциональные модели Vx насыщение выходного напряжения возбудителя.
Пропорциональные модели KE термина линейное соотношение между выходным напряжением возбудителя и текущим полем возбудителя.
Подсистема Integrator интегрирует различие между EFE и VFE, чтобы сгенерировать выходное полевое напряжение Efd. TE является постоянной времени для этого процесса.
[1] Методические рекомендации IEEE для системных моделей возбуждения для исследований устойчивости энергосистемы. Станд. IEEE 421.5-2016. Пискатауэй, NJ: IEEE-SA, 2016.
