Шаговый двигатель, подходящий для целого - полу - и микрошагового представления
Simscape / Электрический / Электромеханический / Reluctance & Stepper
Блок Stepper Motor представляет шаговый двигатель. Это использует входные последовательности импульсов, A и B, чтобы управлять механическим выходом согласно следующим уравнениям:
где:
eA и eB являются противоэлектродвижущими силами (эдс), вызванные в обмотках фазы A и B, соответственно.
iA и iB являются фазой A и B извилистые токи.
vA и vB являются фазой A и B извилистые напряжения.
Km является моторным постоянным крутящим моментом.
Nr является количеством зубов на каждом из двух полюсов ротора. Параметр Full step size (π/2)/Nr.
R является сопротивлением обмотки.
L является извилистой индуктивностью.
Rm является сопротивлением намагничивания.
B является вращательным затуханием.
J является инерцией.
ω является скоростью ротора.
Θ является углом ротора.
Td является амплитудой крутящего момента стопора.
Te является электрическим крутящим моментом.
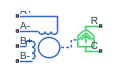
Если начальный ротор является нулем или некоторым кратным (π/2)/Nr, ротор выравнивается с обмоткой фазы импульса A. Это происходит, когда существует положительное текущее течение из A+ к портам A- и нет никакого текущего течения из B+ к портам B-.
Используйте блок Stepper Motor Driver, чтобы создать последовательности импульсов для блока Stepper Motor.
Блок Stepper Motor производит положительный крутящий момент, действующий от механического C до портов R, когда фаза импульса A приводит фазу импульса B.
Если вы устанавливаете параметр Simulation mode на Averaged, и для блока Stepper Motor и для блока Stepper Motor Driver, который управляет им, затем не симулированы отдельные шаги. Это может быть хорошим способом ускорить симуляцию. В режиме Averaged, при неуменьшающихся условиях, двигатель и драйвер представлены линейной системой второго порядка, которая отслеживает заданный уровень шага. Потребованный уровень шага определяется непосредственно из напряжения через A+ и A-. Так, например, напряжение +10 В через A+ и терминалы A- интерпретировано как спрос на уровень шага 10 шагов в секунду. Смотрите страницу с описанием блока Stepper Motor Driver для получения дополнительной информации о том, как соединить блок драйверов с вашим угловым контроллером шага.
Усредненный режим включает средство оценки промаха, чтобы предсказать, уменьшился ли шаговый двигатель при выполнении в Шаговом режиме симуляции. Промах предсказан, если моторный крутящий момент превышает значение параметров Vector of maximum torque values для дольше, чем один период шага, период шага, определяемый из текущего спроса на уровень шага. После обнаружения промаха симуляция продолжит или остановится с ошибкой, согласно значению параметров Action on slipping. Если вы выбираете действие, которое позволяет симуляции продолжить, отметить, что результаты симуляции могут быть неправильными. Когда скольжение происходит, крутящий момент, сгенерированный двигателем, обычно не является максимальным доступным крутящим моментом; максимальный крутящий момент только достигается, если контроллер степпера обнаруживает промах и настраивает команду уровня шага соответственно.
Движущие силы эквивалентной системы второго порядка убеждены из значений, что вы задаете для параметров Maximum step rate command и Approximate total load inertia. Важно, чтобы вы установили максимально точные значения для этих параметров, так, чтобы команда уровня шага была прослежена, и блок не генерирует ложные предупреждения скольжения или ошибки.
Если при запуске двигатель в режиме Averaged с дополнительными тепловыми осушенными портами (см. Тепловые Порты и Эффекты), то нагрейтесь, добавляется к тепловым портам, принимая, что обмотки всегда приводятся в действие, даже когда команда уровня шага является нулем. Блок вносит изменения для того, чтобы наполовину продвинуться и для уменьшаемого крутящего момента (и проветрить токи) на более высоких скоростях. Для этих корректировок, чтобы быть правильными, значения параметров Vector of maximum torque должны быть правильными. Для того, чтобы наполовину продвинуться, на нулевой скорости тепло, выработанное блоком, является средним значением сгенерированного, когда остановлено на половине шага и на полном шаге.
Чтобы подтвердить настройки модели режима Averaged, где вы предсказываете промах, чтобы произойти, сравните результаты с той же симуляцией, выполняемой в шаговом режиме.
Блок имеет три дополнительных тепловых порта, один для каждой из этих двух обмоток и один для ротора. Эти порты скрыты по умолчанию. Чтобы осушить тепловые порты, щелкните правой кнопкой по блоку по своей модели, и затем из контекстного меню выбирают Simscape> Block choices> Show thermal port. Это действие отображает тепловые порты на значке блока и добавляет Temperature Dependence, и Thermal Port переходит в диалоговое окно блока. Эти вкладки описаны далее на этой странице с описанием.
Используйте тепловые порты, чтобы симулировать эффекты медного сопротивления и железных потерь, которые преобразуют электроэнергию нагреться. Если вы осушаете эти порты, сопротивление обмотки принято линейно зависимое на температуре и дано:
| R = R0 (1 + α (T – T0)) | (1) |
где:
R является сопротивлением в температурном T.
R0 является сопротивлением при измерении (или ссылка) температурный T0. Задайте ссылочную температуру с помощью параметра Measurement temperature.
α коэффициент температуры сопротивления, который вы задаете параметром Resistance temperature coefficients, [alpha_A alpha_B]. Типичное значение для меди является 0.00393/K.
Блок вычисляет температуру каждой из обмоток и ротора
где
M является количеством тепла. Задайте это значение для обмоток с помощью параметра Winding thermal masses, [M_A M_B], и для ротора с помощью параметра Rotor thermal mass.
T является температурой. Задайте начальные значения для обмоток с помощью параметра Winding initial temperatures, [T_A T_B], и для ротора с помощью параметра Rotor initial temperature.
Q является тепловым потоком, который вычисляется от железных потерь обмоток:
где ρm является процентом намагничивания сопротивления, сопоставленного с ротором. Задайте этот процент с помощью параметра Percentage of magnetizing resistance associated with the rotor.
Существует несколько доступной встроенной параметризации для блока Stepper Motor.
Эти данные перед параметризацией позволяют вам настраивать блок, чтобы представлять определенный компонент поставщика. Чтобы загрузить предопределенную параметризацию, нажмите на "Выбор предопределенная параметризация" гиперссылка в маске блока Stepper Motor и выберите определенную часть, которую вы хотите загрузить из списка доступных компонентов.
Предопределенная параметризация компонентов Simscape использует доступные источники данных в предоставлении значений параметров. Техническое решение и упрощение предположений используются, чтобы заполнить для недостающих данных. В результате отклонения между симулированным и фактическим физическим поведением должны ожидаться. Чтобы гарантировать необходимую точность, необходимо подтвердить симулированное поведение против экспериментальных данных и совершенствовать модели компонента по мере необходимости.
Модель основана на следующих предположениях:
Эта модель пропускает магнитные эффекты насыщения и любую магнитную связь между фазами.
Когда вы установите флажок Start simulation from steady state в блоке Simscape™Solver Configuration, этот блок не инициализирует значение Initial rotor angle между –π и π.
Чтобы использовать режим Averaged, блок Stepper Motor должен быть непосредственно соединен с блоком Stepper Motor Driver, также запускающимся в режиме Averaged.
Режим Averaged является приближением, и точное отслеживание шага по сравнению с режимом Stepping не должно ожидаться.
Ускользните обнаружение в режиме Averaged является аппроксимированным, и зависит от хорошей оценки для инерции загрузки и максимального уровня шага. Неправильные значения могут привести к ложному обнаружению промаха.
Когда симуляция закрадывается в режим Averaged, она принята, что контроллер шагового двигателя настраивает команду уровня шага, чтобы достигнуть максимального возможного крутящего момента.
[1] М. Бодсон, Дж. Н. Чиэссон, Р. Т. Новотнэк и Р. Б. Рековский. “Высокоэффективное нелинейное управление с обратной связью шагового двигателя постоянного магнита”. Транзакции IEEE на технологии систем управления, издании 1, № 1, март 1993.
[2] П. П. Акарнли. Шаговые двигатели: руководство по современной теории и практике. Нью-Йорк: Peregrinus, 1982.
[3] С.Е. Лышевский. Электромеханические системы, электрические машины и прикладная механотроника. CRC, 1999.


