Расстояние между сигналами с помощью динамической трансформации временной шкалы
dist = dtw(x,y)x и y, на единый набор моментов, таким образом, что dist, сумма Евклидовых расстояний между соответствующими точками, является самым маленьким. Расширять входные параметры, dtw повторения каждый элемент x и y так же много раз по мере необходимости. Если x и y матрицы, затем dist расширяет их путем повторения их столбцов. В этом случае, x и y должен иметь одинаковое число строк.
[ возвращает единый набор моментов или деформирующийся путь, такой что dist,ix,iy]
= dtw(x,y)x(ix) и y(iy) имейте самый маленький dist между ними.
Векторы ix и iy имейте ту же длину. Каждый содержит монотонно увеличивающуюся последовательность в который индексы к элементам соответствующего сигнала, x или y, повторяются необходимое число раз.
Когда x и y матрицы, ix и iy таковы что x(:,ix) и y(:,iy) минимально разделяются.
dtw(___) без выходных аргументов строит исходные и выровненные сигналы.
Если сигналы являются векторами действительных чисел, функция отображает два исходных сигнала на подграфике и выровненные сигналы в подграфике ниже первого.
Если сигналы являются комплексными векторами, функция отображает исходные и выровненные сигналы в 3D графиках.
Если сигналы являются действительными матрицами, функция использует imagesc отобразить исходные и выровненные сигналы.
Если сигналы являются комплексными матрицами, графики функций их действительные и мнимые части в верхней и нижней половине каждого изображения.
Сгенерируйте два действительных сигнала: щебет и синусоида.
x = cos(2*pi*(3*(1:1000)/1000).^2); y = cos(2*pi*9*(1:399)/400);
Используйте динамическую трансформацию временной шкалы, чтобы выровнять сигналы, таким образом, что сумма Евклидовых расстояний между их точками является самой маленькой. Отобразите выровненные сигналы и расстояние.
dtw(x,y);

Измените частоту синусоиды в дважды ее начальное значение. Повторите расчет.
y = cos(2*pi*18*(1:399)/400); dtw(x,y);

Добавьте мнимую часть в каждый сигнал. Восстановите начальную частоту синусоиды. Используйте динамическую трансформацию временной шкалы, чтобы выровнять сигналы путем минимизации суммы Евклидовых расстояний в квадрате.
x = exp(2i*pi*(3*(1:1000)/1000).^2);
y = exp(2i*pi*9*(1:399)/400);
dtw(x,y,'squared');
Создайте гарнитуру, которая напоминает выход ранних компьютеров. Используйте его, чтобы записать слову MATLAB®.
chr = @(x)dec2bin(x')-48; M = chr([34 34 54 42 34 34 34]); A = chr([08 20 34 34 62 34 34]); T = chr([62 08 08 08 08 08 08]); L = chr([32 32 32 32 32 32 62]); B = chr([60 34 34 60 34 34 60]); MATLAB = [M A T L A B];
Повредите слово путем повторения случайных столбцов букв и варьирования интервала. Покажите исходное слово и три поврежденных версии. Сбросьте генератор случайных чисел для восстанавливаемых результатов.
rng('default') c = @(x)x(:,sort([1:6 randi(6,1,3)])); subplot(4,1,1,'XLim',[0 60]) spy(MATLAB) xlabel('') ylabel('Original') for kj = 2:4 subplot(4,1,kj,'XLim',[0 60]) spy([c(M) c(A) c(T) c(L) c(A) c(B)]) xlabel('') ylabel('Corrupted') end

Сгенерируйте две более поврежденных версии слова. Выровняйте их использующий динамическую трансформацию временной шкалы.
one = [c(M) c(A) c(T) c(L) c(A) c(B)]; two = [c(M) c(A) c(T) c(L) c(A) c(B)]; [ds,ix,iy] = dtw(one,two); onewarp = one(:,ix); twowarp = two(:,iy);
Отобразите невыровненные и выровненные слова.
figure subplot(4,1,1) spy(one) xlabel('') ylabel('one') subplot(4,1,2) spy(two,'r') xlabel('') ylabel('two') subplot(4,1,3) spy(onewarp) xlabel('') ylabel('onewarp') subplot(4,1,4) spy(twowarp,'r') xlabel('') ylabel('twowarp')

Повторите расчет с помощью встроенной функциональности dtw.
dtw(one,two);

Сгенерируйте два сигнала, состоящие из двух отличных peaks, разделенных оврагами различных длин. Постройте сигналы.
x1 = [0 1 0 0 0 0 0 0 0 0 0 1 0]*.95; x2 = [0 1 0 1 0]*.95; subplot(2,1,1) plot(x1) xl = xlim; subplot(2,1,2) plot(x2) xlim(xl)

Выровняйте сигналы без ограничения на деформирующийся путь. Чтобы произвести совершенное выравнивание, функция должна повторить только одну выборку более короткого сигнала.
figure dtw(x1,x2);

Постройте деформирующийся путь и прямолинейную подгонку между двумя сигналами. Чтобы достигнуть выравнивания, функция расширяет канавку между peaks великодушно.
[d,i1,i2] = dtw(x1,x2);
figure
plot(i1,i2,'o-',[i1(1) i1(end)],[i2(1) i2(end)])
Повторите расчет, но теперь ограничьте деформирующийся путь отклонять самое большее три элемента от прямолинейной подгонки. Постройте расширенные сигналы и деформирующийся путь.
[dc,i1c,i2c] = dtw(x1,x2,3); subplot(2,1,1) plot([x1(i1c);x2(i2c)]','.-') title(['Distance: ' num2str(dc)]) subplot(2,1,2) plot(i1c,i2c,'o-',[i1(1) i1(end)],[i2(1) i2(end)])

Ограничение устраняет деформирование от концентрации слишком много на небольшом подмножестве выборок, за счет качества выравнивания. Повторите вычисление с ограничением с одной выборкой.
dtw(x1,x2,1);

Загрузите речевой сигнал, произведенный в . Файл содержит запись женского голоса, говоря слово "MATLAB®".
load mtlb % To hear, type soundsc(mtlb,Fs)
Извлеките два сегмента, которые соответствуют двум экземплярам/æ/фонемы. Первый происходит примерно между 150 мс и 250 мс, и второй между 370 мс и 450 мс. Постройте эти две формы волны.
a1 = mtlb(round(0.15*Fs):round(0.25*Fs)); a2 = mtlb(round(0.37*Fs):round(0.45*Fs)); subplot(2,1,1) plot((0:numel(a1)-1)/Fs+0.15,a1) title('a_1') subplot(2,1,2) plot((0:numel(a2)-1)/Fs+0.37,a2) title('a_2') xlabel('Time (seconds)')

% To hear, type soundsc(a1,Fs), pause(1), soundsc(a2,Fs)Деформируйте оси времени так, чтобы Евклидово расстояние между сигналами было минимизировано. Вычислите разделяемую "длительность" деформированных сигналов и постройте их.
[d,i1,i2] = dtw(a1,a2); a1w = a1(i1); a2w = a2(i2); t = (0:numel(i1)-1)/Fs; duration = t(end)
duration = 0.1297
subplot(2,1,1) plot(t,a1w) title('a_1, Warped') subplot(2,1,2) plot(t,a2w) title('a_2, Warped') xlabel('Time (seconds)')

% To hear, type soundsc(a1w,Fs), pause(1), sound(a2w,Fs)Повторите эксперимент с полным словом. Загрузите файл, содержащий слово, "сильное", произнесенное женщиной и мужчиной. Сигналы производятся на уровне 8 кГц.
load('strong.mat') % To hear, type soundsc(her,fs), pause(2), soundsc(him,fs)
Деформируйте оси времени так, чтобы абсолютное расстояние между сигналами было минимизировано. Постройте исходные и преобразованные сигналы. Вычислите их разделяемую деформированную "длительность".
dtw(her,him,'absolute'); legend('her','him')

[d,iher,ihim] = dtw(her,him,'absolute');
duration = numel(iher)/fsduration = 0.8394
% To hear, type soundsc(her(iher),fs), pause(2), soundsc(him(ihim),fs)Файлы MATLAB1.gif и MATLAB2.gif содержите две рукописных выборки слова "MATLAB®". Загрузите файлы и выровняйте их вдоль оси X с помощью динамической трансформации временной шкалы.
samp1 = 'MATLAB1.gif'; samp2 = 'MATLAB2.gif'; x = double(imread(samp1)); y = double(imread(samp2)); dtw(x,y);

Два сигнала с эквивалентными функциями, расположенными в том же порядке, могут казаться очень отличающимися из-за различий в длительности их разделов. Динамическая трансформация временной шкалы искажает эту длительность так, чтобы соответствующие функции появились в том же местоположении на общей оси времени, таким образом подсветив общие черты между сигналами.
Рассмотрите два K - размерные сигналы
и
которые имеют M и выборки N, соответственно. Учитывая dmn (X, Y), расстояние между m th выборка X и n th выборка Y задано в metricdist X и Y фрагментов на единый набор моментов, таким образом, что глобальная мера по расстоянию от сигнала к сигналу является самой маленькой.
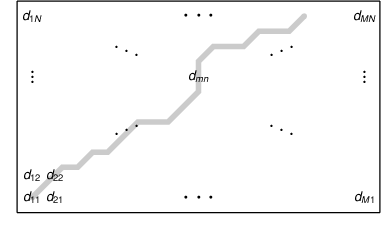
Первоначально, функция располагает все возможные значения dmn (X, Y) в решетку формы
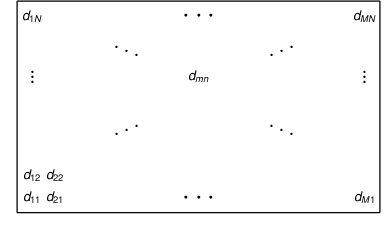
Затем dist ищет путь через решетку — параметрированный двумя последовательностями той же длины, ix и iy— таким образом, что
минимально. Приемлемый dist пути запускаются в d 11 (X, Y), конец в dMN (X, Y), и являются комбинациями “шахматного короля” перемещения:
Вертикальные перемещения: (m, n) → (m + 1, n)
Горизонтальные перемещения: (m, n) → (m, n + 1)
Диагональные перемещения: (m, n) → (m + 1, n + 1)
Эта структура гарантирует, что любой приемлемый путь выравнивает полные сигналы, не пропускает выборки и не повторяет функции сигнала. Кроме того, привлекательный путь запускается близко к диагональной линии, расширенной между d 11 (X, Y) и dMN (X, Y). Это дополнительное ограничение, настроенное maxsamp аргумент, гарантирует, что деформирование сравнивает разделы подобной длины и не сверхсоответствует функциям выброса.
Это - возможный путь через решетку:
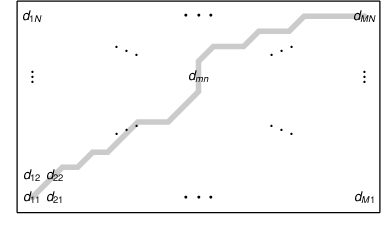
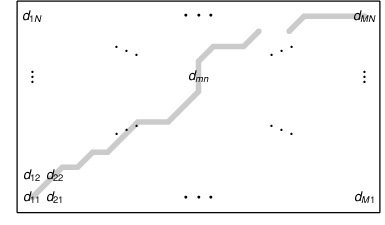
Следующие пути не позволены:
|
|
|
| Не выравнивает целые сигналы | Выборки пропусков | Возвращается на себе, повторяя функцию |
[1] Paliwal, K. K. Anant Agarwal и Сарвэджит С. Синха. "Модификация по Sakoe и Алгоритму Динамической трансформации временной шкалы Чибы для Изолированного Распознавания слов". Обработка сигналов. Издание 4, 1982, стр 329–333.
[2] Sakoe, Hiroaki и Чиба Seibi. "Динамическая Оптимизация Алгоритма Программирования для Распознавания Произносимого слова". IEEE® Transactions на Акустике, Речи и Обработке сигналов. Издание ASSP-26, № 1, 1978, стр 43–49.
alignsignals | edr | finddelay | findsignal | xcorr