Данные сохранены в файл путем первого сохранения данных к рабочей области MATLAB® через Simulink®
Scope блок. Прежде, чем запустить приложение реального времени, набор сигнализирует и инициировать свойства.
После того, как вы создадите модель Simulink и добавите блок Scope, можно ввести сигнал и свойства инициирования для регистрации данных к файлу.
Эта процедура использует модель sldrtex_model
(matlab: open_system(docpath(fullfile(docroot, 'toolbox', 'sldrt', 'examples', 'sldrtex_model')))). Это принимает, что вы уже загрузили ту модель.
В Редакторе Simulink, на вкладке Desktop Real-Time, нажимают Prepare> Control Panel.
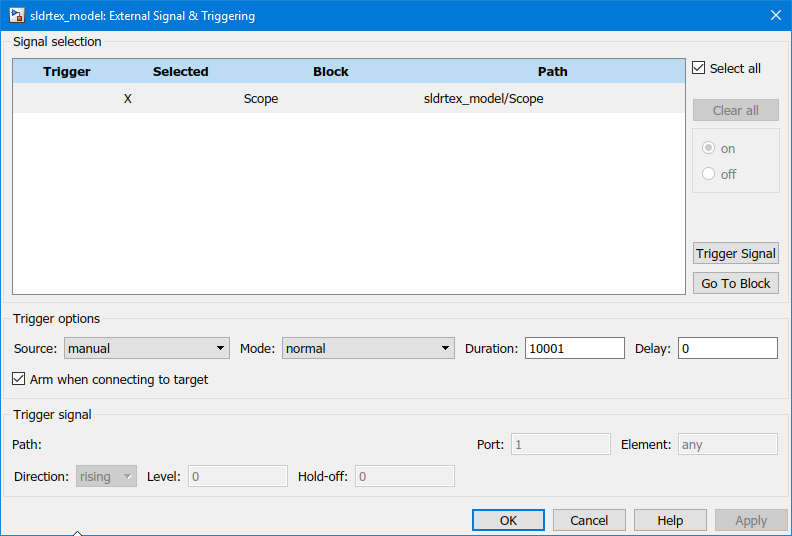
В Панели управления Режима external mode нажмите кнопку Signal & Triggering.
Нажмите кнопку Select all. От Source перечислите, выберите manual. От Mode перечислите, выберите normal.
X под Signal selection определяет это, сигнал был помечен для сбора данных и T определяет это, сигнал был помечен как триггерный сигнал.
В поле Duration введите номер точек выборки в буфере данных. Введите значение Duration, равное общему количеству точек выборки, что необходимо собраться для запуска. Например, если у вас есть частота дискретизации 1 000 выборок/секунда и время остановки 10 секунд, введите:
10000
Установите ось времени для Simulink блоки Scope, равные демонстрационному интервалу (в секундах) времена число точек в каждом буфере данных. Эта установка отображает один буфер данных через целый график Осциллографа Simulink.
Снимите флажок Limit data points to last. Смотрите Установленные Параметры Осциллографа для Логгирования к Рабочей области.
Для получения дополнительной информации смотрите Симуляцию Режима external mode с TCP/IP или Последовательную передачу (Simulink Coder).
Нажмите Close.
В диалоговом окне External Signal & Triggering нажмите кнопки Apply или Close для изменений, которые вы внесли, чтобы вступить в силу. Вы не должны восстанавливать свое приложение реального времени.
