Объект для хранения внутренних параметров камеры
Храните информацию о внутренних калибровочных параметрах камеры, включая параметры искажения объектива.
intrinsics = cameraIntrinsics(focalLength,principalPoint,imageSize)cameraParameters для получения дополнительной информации.
intrinsics = cameraIntrinsics(___,Name,Value)intrinsics = cameraIntrinsics('RadialDistortion',[0,0])
RadialDistortion — Радиальное искажение объективаРадиальное искажение объектива в виде разделенной запятой пары, состоящей из RadialDistortion и двухэлементный вектор, [k1, k2], или трехэлементный вектор, [k1, k2, k3]. k1, k2 и k3 являются радиальными коэффициентами искажения. Радиальное искажение происходит, когда световые лучи изгибаются более близкий ребра линзы, чем они делают в ее оптическом центре. Чем меньший линза, тем больше искажение.
Радиальное искажение происходит, когда световые лучи изгибаются более близкий ребра линзы, чем они делают в ее оптическом центре. Чем меньший линза, тем больше искажение.

Объект параметров камеры вычисляет радиальное искаженное местоположение точки. Можно обозначить искаженные точки как (искаженный x, искаженный y), можно следующим образом:
| x, искаженный = x (1 + k 1*r2 + k 2*r4 + k 3*r6) | (1) |
| y, искаженный = y (1 + k 1*r2 + k 2*r4 + k 3*r6) | (2) |
| x, y = неискаженные пиксельные местоположения |
| k 1, k 2, и k 3 = радиальные коэффициенты искажения линзы |
| r 2 = x 2 + y 2 |
TangentialDistortion — Тангенциальные коэффициенты искаженияТангенциальные коэффициенты искажения в виде разделенной запятой пары, состоящей из 'TangentialDistortion'и вектор с 2 элементами, [p 1, p 2]. Тангенциальное искажение происходит, когда линза и плоскость изображения не параллельны.
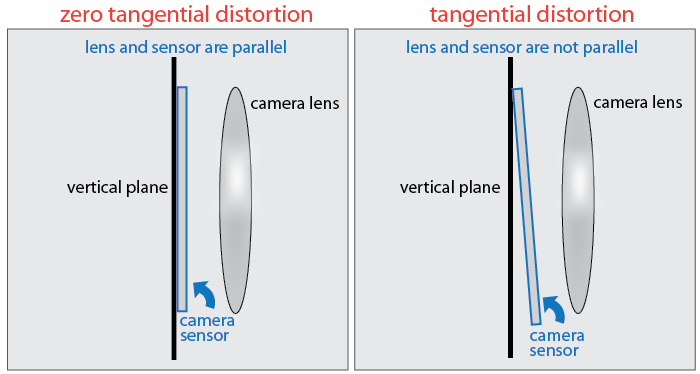
Объект параметров камеры вычисляет тангенциальное искаженное местоположение точки. Можно обозначить искаженные точки как (искаженный x, искаженный y), можно следующим образом:
| x, искаженный = x + [2 * p 1 * x * y + p 2 * (r 2 + 2 * x 2)] | (3) |
| y, искаженный = y + [p 1 * (r 2 + 2*y2) + 2 * p 2 * x * y] | (4) |
| x, y = неискаженные пиксельные местоположения |
| p 1 и p 2 = тангенциальные коэффициенты искажения линзы |
| r 2 = x 2 + y 2 |
Skew — Скос осей камерыОси камеры скашиваются в виде разделенной запятой пары, состоящей из 'skew'и угол. Если x и оси y точно перпендикулярны, то скосом должен быть 0.
FocalLength — Фокусное расстояниеЭто свойство доступно только для чтения.
Фокусное расстояние в x и y, сохраненном как вектор с 2 элементами [fx, fy] в пикселях.
| fx = F * sx |
| fy = F * sy |
Фокусное расстояние F влияет на угол представления и таким образом влияет на область сцены, которая кажется фокусируемой в изображении. Для фиксированного подчиненного расстояния:
Короткое фокусное расстояние предлагает широкий угол представления, позволяющего получать большую площадь сцены под особым вниманием. Это подчеркивает и предмет и фон сцены.
Долгое фокусное расстояние предлагает узкий угол представления, таким образом уменьшая область сцены под особым вниманием. Это подчеркивает больше на предмете и ограничивает сумму фона от того, чтобы быть полученным.
PrincipalPoint — Оптический центр камерыЭто свойство доступно только для чтения.
Оптический центр камеры, сохраненной как двухэлементный вектор [cx, cy] в пикселях. Вектор содержит координаты оптического центра камеры.
ImageSize — Размер изображения производится камеройЭто свойство доступно только для чтения.
Размер изображения производится камерой, сохраненной как двухэлементный вектор, [mrows, ncols].
IntrinsicMatrix — Матрица проекцииЭто свойство доступно только для чтения.
Матрица проекции, сохраненная как разделенная запятой пара, состоящая из 'IntrinsicMatrix'и 3х3 матрица. Для матричного формата объект использует следующий формат:
Координаты [cx
cy] представляют оптический центр (основная точка) в пикселях. Когда x и ось y точно перпендикулярны, скошенный параметр, s, равняется 0.
| fx = F *sx |
| fy = F *sy |
| F, фокусное расстояние в мировых единицах измерения, обычно выраженных в миллиметрах. |
| [s x, s y] является количеством пикселей на мировую единицу измерения в x и направлении y соответственно. |
| fx и fy выражаются в пикселях. |
Camera Calibrator | Stereo Camera Calibrator | cameraParameters | undistortImage
