Вычислите угловую метрическую матрицу и найдите углы в изображениях
Computer Vision Toolbox / Analysis & Enhancement

Блок Corner Detection находит углы в изображении при помощи детектирования углов методом Харриса (Харрисом и Стивенсом), минимальное собственное значение (Ши и Томэзи), или локальное сравнение интенсивности (на основе метод Accelerated Segment Test, (FAST) Ростена и Драммонда) метод. Блок находит углы в изображении на основе пикселей, которые имеют самые большие угловые метрические значения.
Метод решает, что пиксель является возможным углом, если это имеет или, N непрерывные допустимые яркие окружающие пиксели или N непрерывные темные окружающие пиксели.
Предположим, что p является пикселем на рассмотрении, и j является одним из пикселей, окружающих p. Местоположения других окружающих пикселей обозначаются заштрихованными областями в следующем рисунке. Заштрихованные области в этом рисунке обозначают местоположения других окружающих пикселей.
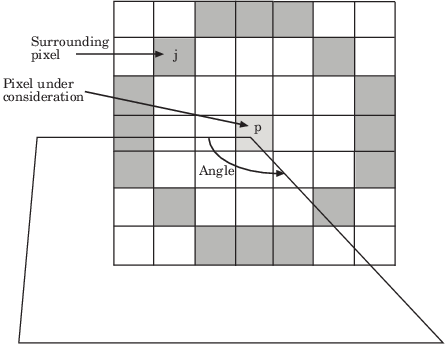
и интенсивность пикселей p и j, соответственно. Пиксель j является допустимым ярким окружающим пикселем если . Точно так же пиксель j является допустимым темным окружающим пикселем если . В этих уравнениях T является значением, которое вы задали для параметра Intensity comparison threshold.
Блок повторяет этот процесс, чтобы определить, имеет ли блок непрерывные допустимые окружающие пиксели N. Значение N связано со значением, которое вы задаете для параметра Maximum angle to be considered a corner (in degrees), как показано в этой таблице.
Количество допустимых окружающих пикселей и угла
| Количество допустимых окружающих пикселей | Угол (степени) |
|---|---|
| 15 | 22.5 |
| 14 | 45 |
| 13 | 67.5 |
| 12 | 90 |
| 11 | 112.5 |
| 10 | 135 |
| 9 | 157.5 |
[1] Харрис, C. и М Стивенс. “Объединенный детектор угла и ребра”. Продолжения 4-й конференции по видению Alvey, 147-151. Август 1988.
[2] Ши, J. и К. Томэзи. “Хорошие функции, чтобы отследить”. Продолжения конференции по IEEE по компьютерному зрению и распознаванию образов, 593-600. Июнь 1994.
[3] Rosten, E. и Т. Драммонд. “Плавя точки и линии для высокопроизводительного отслеживания”. Продолжения международной конференции IEEE по вопросам издания 2, 1508-1511 компьютерного зрения. Октябрь 2005.
Эти схемы показывают типы данных, используемые в блоке Corner Detection в сигналах фиксированной точки. Эти схемы применяются к детектированию углов методом Харриса и минимальным методам собственного значения только.
Следующая таблица обобщает переменные, используемые в предыдущих схемах.
| Имя переменной | Определение |
|---|---|
| IN_DT | Тип входных данных |
| MEM_DT | Тип данных оперативной памяти |
| OUT_DT | Метрический тип выходных данных |
| COEF_DT | Содействующий тип данных |
Estimate Geometric Transformation | Find Local Maxima | detectSURFFeatures | extractFeatures | matchFeatures
