3-D местоположения неискаженных соответствующих точек в стереоизображениях
worldPoints = triangulate(matchedPoints1,matchedPoints2,stereoParams)
worldPoints = triangulate(matchedPoints1,matchedPoints2,cameraMatrix1,cameraMatrix2)
[ дополнительно возвращает ошибки перепроекции для мировых точек с помощью любого из входных параметров от предыдущих синтаксисов.worldPoints,reprojectionErrors]
= triangulate(___)
Загрузите параметры стерео.
load('webcamsSceneReconstruction.mat');Читайте в стереопаре изображений.
I1 = imread('sceneReconstructionLeft.jpg'); I2 = imread('sceneReconstructionRight.jpg');
Не исказите изображения.
I1 = undistortImage(I1,stereoParams.CameraParameters1); I2 = undistortImage(I2,stereoParams.CameraParameters2);
Обнаружьте поверхность в обоих изображениях.
faceDetector = vision.CascadeObjectDetector; face1 = faceDetector(I1); face2 = faceDetector(I2);
Найдите центр поверхности.
center1 = face1(1:2) + face1(3:4)/2; center2 = face2(1:2) + face2(3:4)/2;
Вычислите расстояние от камеры 1 к поверхности.
point3d = triangulate(center1, center2, stereoParams); distanceInMeters = norm(point3d)/1000;
Отобразите обнаруженную поверхность и расстояние.
distanceAsString = sprintf('%0.2f meters', distanceInMeters); I1 = insertObjectAnnotation(I1,'rectangle',face1,distanceAsString,'FontSize',18); I2 = insertObjectAnnotation(I2,'rectangle',face2, distanceAsString,'FontSize',18); I1 = insertShape(I1,'FilledRectangle',face1); I2 = insertShape(I2,'FilledRectangle',face2); imshowpair(I1, I2, 'montage');

matchedPoints1 — Координаты точек в изображении 1SURFPoints возразите | MSERRegions возразите | cornerPoints возразите | BRISKPoints объектКоординаты точек в изображении 1 в виде M-by-2 матрица количества M [x
y] координаты, или как KAZEPoints, SURFPoints, MSERRegions, cornerPoints, или BRISKPoints объект. matchedPoints1 и matchedPoints2 входные параметры должны содержать точки, которые являются соответствующими с помощью функции, такой как matchFeatures.
matchedPoints2 — Координаты точекSURFPoints возразите | MSERRegions возразите | cornerPoints возразите | BRISKPoints объектКоординаты точек в изображении 2 в виде M-by-2 матрица количества M [x
y] координаты, или как KAZEPoints, SURFPoints, MSERRegions, cornerPoints, или BRISKPoints объект. matchedPoints1 и matchedPoints2 входные параметры должны содержать точки, которые являются соответствующими с помощью функции, такой как matchFeatures.
stereoParams — Параметры камеры для системы стереоstereoParameters объектПараметры камеры для системы стерео в виде stereoParameters объект. Объект содержит внутренний параметр, значение внешних параметров и параметры искажения объектива системы стереофотоаппарата. Можно использовать estimateCameraParameters функционируйте, чтобы оценить параметры камеры и возвратить stereoParameters объект.
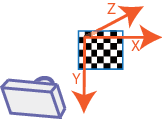
Когда вы передаете stereoParameters возразите против функции, источник системы мировой координаты расположен в оптическом центре камеры 1. x - ось указывает направо, y - точки оси вниз и z - точки оси далеко от камеры.

cameraMatrix1 — Матрица проекцииМатрица проекции для камеры 1 в виде 4 3 матрицы. Матрица сопоставляет 3-D точку в однородных координатах на соответствующую точку в изображении камеры. Этот вход описывает местоположение и ориентацию камеры 1 в системе мировой координаты. cameraMatrix1 должна быть действительная и неразреженная числовая матрица. Можно получить матрицу камеры использование cameraMatrix функция.
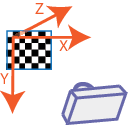
Матрицы камеры передали функции, задайте систему мировой координаты.
cameraMatrix2 — Матрица проекцииМатрица проекции для камеры 1 в виде 4 3 матрицы. Матрица сопоставляет 3-D точку в однородных координатах на соответствующую точку в изображении камеры. Этот вход описывает местоположение и ориентацию камеры 1 в системе мировой координаты. cameraMatrix1 должна быть действительная и неразреженная числовая матрица. Можно получить матрицу камеры использование cameraMatrix функция.
Матрицы камеры передали функции, задайте систему мировой координаты.
worldPoints — 3-D местоположения соответствия с парами неискаженных точек изображений3-D местоположения соответствия с парами неискаженного изображения указывают в виде M-by-3 матрицу. Матрица содержит количество M [x, y, z] местоположения соответствия с парами неискаженных точек изображений от двух стереоизображений.
Когда вы задаете геометрию камеры с помощью stereoParams, мировые координаты точки относительно оптического центра камеры 1.
Когда вы задаете геометрию камеры с помощью cameraMatrix1 и cameraMatrix2, мировые координаты точки заданы матрицами камеры.
Функция возвращает worldPoints как double, если matchedPoints1 и matchedPoints2 double. В противном случае функция возвращает worldPoints как single.
Типы данных: single | double
reprojectionErrors — Ошибки перепроекцииОшибки перепроекции, возвращенные как M-by-1 вектор. Функциональные проекты каждая мировая точка назад в оба изображения. Затем в каждом изображении, функция вычисляет ошибку перепроекции как расстояние между обнаруженным и повторно спроектированной точкой. reprojectionErrors вектор содержит среднюю ошибку перепроекции для каждой мировой точки.

triangulate функция не составляет искажение объектива. Можно не исказить изображения с помощью undistortImage функция прежде, чем обнаружить точки. В качестве альтернативы можно не исказить сами точки с помощью undistortPoints функция.
[1] Хартли, R. и А. Зиссермен. "Несколько Геометрия Представления в Компьютерном зрении". Издательство Кембриджского университета, p. 312, 2003.
Camera Calibrator | Stereo Camera Calibrator | cameraMatrix | cameraParameters | estimateCameraParameters | reconstructScene | relativeCameraPose | stereoParameters | undistortImage | undistortPoints
