Выровняйте два потока пиксельных данных
visionhdl.PixelStreamAligner Система object™ синхронизирует потоки на два пикселя путем задержки одного потока, чтобы совпадать с синхронизацией ссылочного потока. Много алгоритмов Vision HDL Toolbox™ задерживают пиксельный поток, и сумма задержки может измениться, когда вы настраиваете параметры алгоритма. Можно использовать этот объект выровнять потоки для того, чтобы наложить, сравнить или объединить два потока такой как в Гауссовой операции размытости. Используйте задержанный поток в качестве refPixel и refCtrl аргументы. Используйте более ранний поток в качестве pixelIn и ctrlIn аргументы.
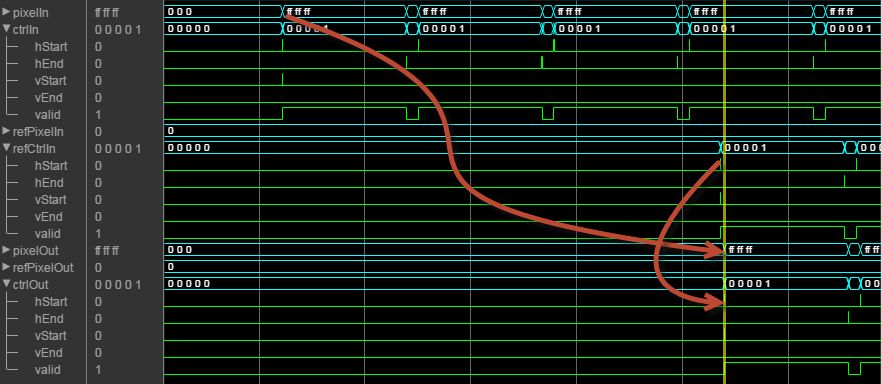
Эта схема формы волны показывает входные потоки, pixelIn и refPixelIn, и их связанные управляющие сигналы. Ссылочный входной кадр запускается позже, чем pixelIn система координат. Выходные сигналы показывают, что объект задерживает pixelIn совпадать со ссылочным потоком, и что оба потока вывода совместно используют управляющие сигналы. Между входом refCtrl существует короткая задержка и выход refCtrl. В этой симуляции, чтобы разместить задержку четырех линий между входными потоками, MaxNumberofLines должен быть установлен в по крайней мере 4.
Для получения дополнительной информации на пиксельной шине управления и размерностях видеокадра, смотрите Пиксельный Интерфейс Потоковой передачи.
align = visionhdl.PixelStreamAligneralign, это синхронизирует пиксельный поток со ссылочным пиксельным потоком.
| шаг | Выровняйте два потока пиксельных данных |
| Характерный для всех системных объектов | |
|---|---|
release | Позвольте изменения значения свойства Системного объекта |
Наложите обработанный видеопоток на входном потоке.
Подготовьте тестовое изображение путем выбора фрагмента файла изображения.
frmActivePixels = 64; frmActiveLines = 48; frmOrig = imread('rice.png'); frmInput = frmOrig(1:frmActiveLines,1:frmActivePixels); figure imshow(frmInput,'InitialMagnification',300) title 'Input Image'
![]()
Создайте сериализатор и задайте размер неактивных пиксельных областей.
frm2pix = visionhdl.FrameToPixels( ... 'NumComponents',1, ... 'VideoFormat','custom', ... 'ActivePixelsPerLine',frmActivePixels, ... 'ActiveVideoLines',frmActiveLines, ... 'TotalPixelsPerLine',frmActivePixels+10, ... 'TotalVideoLines',frmActiveLines+10, ... 'StartingActiveLine',6, ... 'FrontPorch',5);
Сериализируйте тестовое изображение с помощью объекта, который вы создали. pixIn вектор значений интенсивности. ctrlIn вектор структур управляющего сигнала. Предварительно выделите векторы для выходных сигналов.
[pixIn,ctrlIn] = frm2pix(frmInput);
[~,~,numPixelsPerFrame] = getparamfromfrm2pix(frm2pix);
ctrlOut = repmat(pixelcontrolstruct,numPixelsPerFrame,1);
overlayOut = zeros(numPixelsPerFrame,1,'uint8');
Запишите функцию, которая создает и вызывает Системные объекты, чтобы обнаружить ребра и затем выровнять данные о ребре с исходными пиксельными данными. Результаты ребра задерживаются задержкой EdgeDetector объект. Связанные управляющие сигналы становятся ссылкой для выровненного потока. Можно сгенерировать HDL от этой функции.
function [pixelOut,ctrlOut] = EdgeDetectandOverlay(pixelIn,ctrlIn) %EdgeDetectandOverlay % Detects edges in an input stream, and overlays the edge data onto the % original stream. % pixelIn, ctrlIn are a scalar pixel and its associated pixelcontrol structure % You can generate HDL code from this function. persistent align if isempty(align) align = visionhdl.PixelStreamAligner; end persistent find_edges if isempty(find_edges) find_edges = visionhdl.EdgeDetector; end [edgeOut,edgeCtrl] = find_edges(pixelIn,ctrlIn); [origOut,alignedEdgeOut,ctrlOut] = align(pixelIn,ctrlIn,edgeOut,edgeCtrl); if (alignedEdgeOut) pixelOut = uint8(0); % set edge pixels to black else pixelOut = origOut; end end
Для каждого пикселя в системе координат вызовите свою функцию, чтобы искать ребра и выровняться с входным потоком.
for p = 1:numPixelsPerFrame [overlayOut(p),ctrlOut(p)] = EdgeDetectandOverlay(pixIn(p),ctrlIn(p)); end
Создайте объект deserializer с форматом, совпадающим с тем из сериализатора. Преобразуйте пиксельный поток во фрейм изображения путем вызова объекта deserializer. Отобразите получившееся изображение.
pix2frm = visionhdl.PixelsToFrame( ... 'NumComponents',1, ... 'VideoFormat','custom', ... 'ActivePixelsPerLine',frmActivePixels, ... 'ActiveVideoLines',frmActiveLines); [frmOutput,frmValid] = pix2frm(overlayOut,ctrlOut); if frmValid figure imshow(frmOutput, 'InitialMagnification',300) title 'Output Image' end
![]()
