Модель Simulink® Real-Time™, которая использует блоки Stateflow®, может представить особые обстоятельства. Например, если модель реализует алгоритм управления как подсистему Stateflow, сигналы Stateflow не отображаются к Simulink Real-Time по умолчанию.
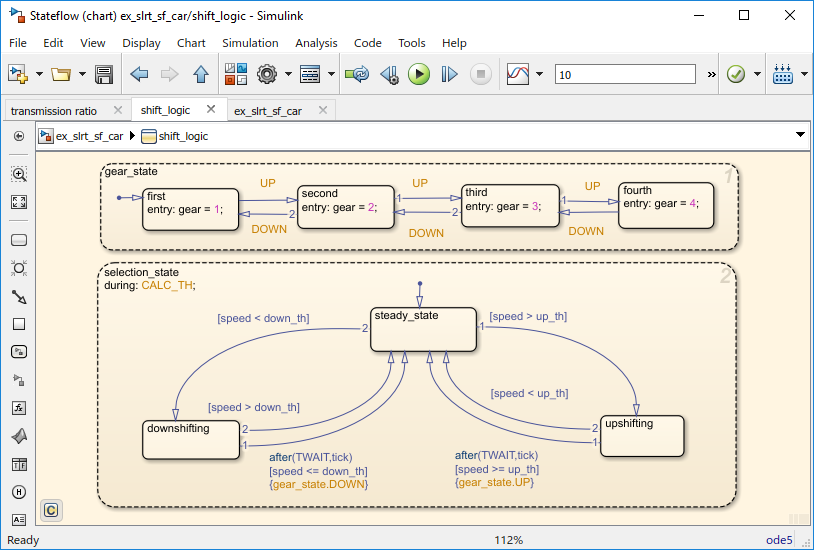
Эта процедура использует модель ex_slrt_sf_car (open_system(docpath(fullfile(docroot, 'toolbox', 'xpc', 'examples', 'ex_slrt_sf_car')))).
Сделать Stateflow сигнализирует видимый к Simulink Real-Time, отметьте их как тестовые точки:
Откройте ex_slrt_sf_car модель.
Дважды кликните shift_logic график.
Во вкладке Modeling нажмите Model Explorer.
В Model Explorer расширьте ex_slrt_sf_car, затем расширьте shift_logic.
Расширьте gear_state, и затем выберите first.
Создать тестовую точку для first состояние, во вкладке Logging панели State first, устанавливает флажок Test point.
Нажмите Apply.
Повторите шаги 8-10 для значений gear_state second, third и fourth.
Создайте и загрузите приложение реального времени на целевой компьютер. На вкладке Real-Time нажмите Run on Target.
Открытый Simulink Real-Time Explorer. На вкладке Real-Time нажмите Prepare> SLRT Explorer.
Соединитесь с целевым компьютером в панели Targets (![]() на панели инструментов).
на панели инструментов).
В панели Applications расширьте приложение реального времени и узел Model Hierarchy.
Чтобы просмотреть тестовую точку, выберите shift_logic и нажмите кнопку View Signals ![]() на панели инструментов.
на панели инструментов.
В рабочей области Сигналов установите флажок Monitor для gear_state.first, gear_state.second, gear_state.third, и gear_state.fourth. Значения сигналов показывают в столбце Monitoring Value.
Чтобы запустить выполнение, кликните по приложению реального времени. На панели инструментов нажмите кнопку Start ![]() .
.
Чтобы остановить выполнение, кликните по приложению реального времени. На панели инструментов нажмите кнопку Stop ![]() .
.

