Используя инструменты Mathworks, можно создать интерполяционные таблицы для внутреннего контроллера постоянного магнита синхронного двигателя (PMSM), который характеризует d-ось и поток q-оси как функция токов q-оси и d-оси.
Чтобы сгенерировать параметры потока для блока Flux-Based PM Controller, выполните эти шаги рабочего процесса. Шаги используют скрипт в качестве примера VisualizeFluxSurface.m.
| Рабочий процесс | Описание |
|---|---|
|
Загрузите и предварительно обработайте эти нелинейные моторные данные о потоке из тестирования динамометра или анализа конечных элементов (FEA):
| |
|
Шаг 2: сгенерируйте равномерно расположенные с интервалами данные |
Используйте интерполяцию сплайна, чтобы сгенерировать равномерно распределенные данные. Визуализируйте объемные поверхностные диаграммы потока. |
|
Установите переменные рабочей области, которые можно использовать для параметров блоков Flux-Based PM Controller. |
Загрузите и предварительно обработайте эти нелинейные моторные данные о потоке из тестирования динамометра или анализа конечных элементов (FEA):
d-и q-текущая ось
d-и q-поток оси
Электромагнитный крутящий момент двигателя
Откройте скрипт в качестве примера VisualizeFluxSurface.m.
Загрузите и предварительно обработайте данные.
% % Load the data from a |mat| file captured from a dynamometer or % another CAE tool. load FEAdata.mat; % Load the data matrix. lambda_d = FEAdata.flux.d; lambda_q = FEAdata.flux.q; id = FEAdata.current.d; iq = FEAdata.current.q;
Таблицы потока и могут иметь различные размеры шага для токов. Равномерно разрядка строк и столбцов помогает улучшить точность интерполяции. Этот скрипт использует интерполяцию сплайна.
Установите интервал для строк таблицы и столбцов.
% Set the spacing for the table rows and columns
flux_d_size = 50;
flux_q_size = 50;
Используйте интерполяцию сплайна, чтобы получить более высокое разрешение.
% Use spline interpolation to get higher resolution id_new = linspace(min(id),max(id),flux_d_size); iq_new = linspace(min(iq),max(iq),flux_q_size); lambda_d_new = interp2(id',iq,lambda_d,id_new',iq_new,'spline'); lambda_q_new = interp2(id',iq,lambda_q,id_new',iq_new,'spline');
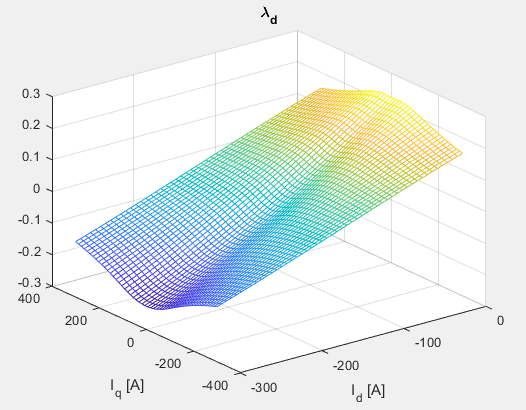
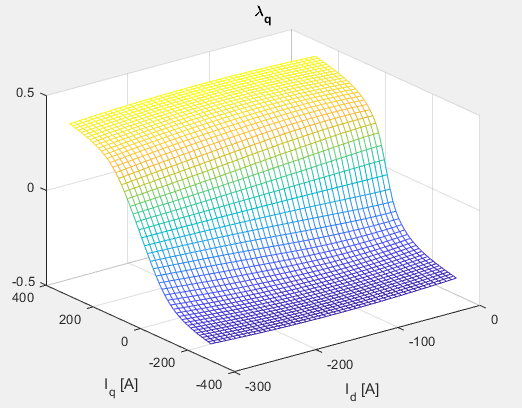
Визуализируйте поверхности потока.
% Visualize the flux surface figure; mesh(id_new,iq_new,lambda_d_new); xlabel('I_d [A]') ylabel('I_q [A]') title('\lambda_d'); grid on; figure; mesh(id_new,iq_new,lambda_q_new); xlabel('I_d [A]') ylabel('I_q [A]') title('\lambda_q'); grid on;
поток d-оси, λd, как функция текущей d-оси, Id и текущая q-ось, Iq.
поток q-оси, λq, как функция текущей d-оси, Id и текущая q-ось, Iq.
Установите параметры блоков на эти значения, присвоенные в скрипте в качестве примера.
| Параметр | MATLAB® Commands |
|---|---|
|
Vector of d-axis current breakpoints, id_index |
id_index=id_new; |
|
Vector of q-axis current breakpoints, iq_index |
iq_index=iq_new; |
| Corresponding d-axis flux, lambda_d |
lambda_d=lambda_d_new; |
|
Corresponding q-axis flux, lambda_q |
lambda_q=lambda_q_new; |
[1] Ху, Dakai, Yazan Alsmadi и Луня Сюй. “Высокое качество нелинейное моделирование IPM на основе измеренного статора извилистое потокосцепление”. IEEE® Transactions на Промышленных Приложениях, Издании 51, № 4, июль/август 2015.
[2] Чен, Сяо, Джиэбин Ван, Bhaskar Сенатор, Панайотис Лазари, Tianfu Sun. “Высокочастотная и В вычислительном отношении Эффективная Модель для Внутренних Машин Постоянного магнита, Рассматривая Магнитное Насыщение, Пространственные Гармоники и Эффект Потери в железе”. Транзакции IEEE на Industrial Electronics, Издании 62, № 7, июль 2015.
[3] Оттоссон, J., М. Алэкула. “Компактное поле, ослабляющее реализацию контроллера”. Международный Симпозиум по Силовой электронике, Электрическим Дискам, Автоматизации и Движению, июль 2006.
