Решите задачу кратчайшего пути в графике
[___] = graphshortestpath(___, задает дополнительные опции с помощью одного или нескольких аргументов пары "имя-значение". Задайте аргументы пары "имя-значение" после любой из комбинаций входных аргументов в предыдущих синтаксисах.Name,Value)
Создайте ориентированного графа с 6 узлами и 11 ребрами.
W = [.41 .99 .51 .32 .15 .45 .38 .32 .36 .29 .21]; DG = sparse([6 1 2 2 3 4 4 5 5 6 1],[2 6 3 5 4 1 6 3 4 3 5],W)
DG = (4,1) 0.4500 (6,2) 0.4100 (2,3) 0.5100 (5,3) 0.3200 (6,3) 0.2900 (3,4) 0.1500 (5,4) 0.3600 (1,5) 0.2100 (2,5) 0.3200 (1,6) 0.9900 (4,6) 0.3800
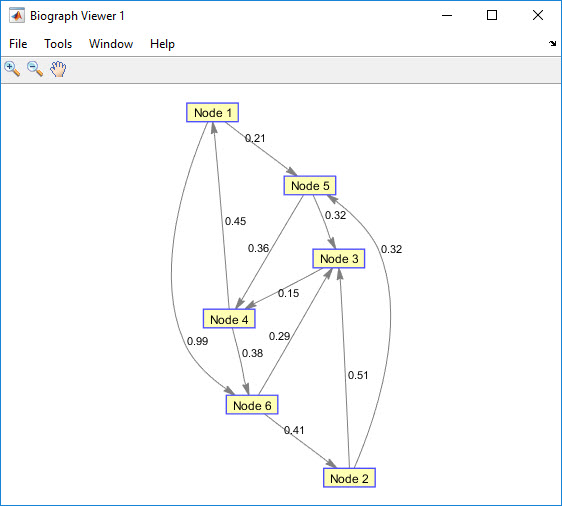
Отобразите график.
h = view(biograph(DG,[],'ShowWeights','on'))

Biograph object with 6 nodes and 11 edges.
Найдите кратчайший путь от узла 1 к узлу 6.
[dist,path,pred] = graphshortestpath(DG,1,6)
dist = 0.9500
path = 1×4
1 5 4 6
pred = 1×6
0 6 5 5 1 4
Отметьте узлы и ребра кратчайшего пути путем окраски их красными и увеличения ширины линии.
set(h.Nodes(path),'Color',[1 0.4 0.4]) edges = getedgesbynodeid(h,get(h.Nodes(path),'ID')); set(edges,'LineColor',[1 0 0]) set(edges,'LineWidth',1.5)

pred содержит узлы-предшественников кратчайших путей от узла 1, исходного узла, ко всем другим узлам, не только заданному целевому узлу. Можно использовать pred запрашивать кратчайшие пути от исходного узла до любого другого узла в графике.
Например, чтобы выяснить кратчайший путь от узла 1 к узлу 4 использования информации в pred, запросите pred с целевым узлом как первый запрос. Затем используйте данный ответ, чтобы получить следующий узел. Повторите эту процедуру, пока вы не получаете ответ запроса как 0, который указывает на исходный узел.
next = pred(4)
next = 5
next = pred(next)
next = 1
next = pred(next)
next = 0
Результаты показывают, что кратчайший путь от узла 1 к узлу 4 1-> 5-> 4.
Создайте неориентированного графа с 6 узлами и 11 ребрами.
W = [.41 .99 .51 .32 .15 .45 .38 .32 .36 .29 .21];
DG = sparse([6 1 2 2 3 4 4 5 5 6 1],[2 6 3 5 4 1 6 3 4 3 5],W);
% tril returns the lower triangular part of the matrix.
UG = tril(DG+DG')UG = (4,1) 0.4500 (5,1) 0.2100 (6,1) 0.9900 (3,2) 0.5100 (5,2) 0.3200 (6,2) 0.4100 (4,3) 0.1500 (5,3) 0.3200 (6,3) 0.2900 (5,4) 0.3600 (6,4) 0.3800
Просмотрите график.
h = view(biograph(UG,[],'ShowArrows','off','ShowWeights','on'))

Biograph object with 6 nodes and 11 edges.
Найдите кратчайший путь от узла 1 к узлу 6. Установите 'Directed' к false указывать, что график не является ориентированным графом.
[dist,path,pred] = graphshortestpath(UG,1,6,'Directed',false)dist = 0.8200
path = 1×4
1 5 3 6
pred = 1×6
0 5 5 1 1 3
Отметьте узлы и ребра кратчайшего пути путем окраски их красными и увеличения ширины линии.
set(h.Nodes(path),'Color',[1 0.4 0.4]) fowEdges = getedgesbynodeid(h,get(h.Nodes(path),'ID')); revEdges = getedgesbynodeid(h,get(h.Nodes(fliplr(path)),'ID')); edges = [fowEdges;revEdges]; set(edges,'LineColor',[1 0 0]) set(edges,'LineWidth',1.5)

dist — Расстояния от исходного узла до всех других узлов в графикеРасстояния от исходного узла до всех других узлов в графике, возвращенном в виде числа или вектора. dist возвращен как скаляр, если вы задаете целевой узел как третий входной параметр.
Функция возвращает Inf для недостижимых узлов и 0 для исходного узла.
path — Кратчайшие пути от исходного узла до всех других узловКратчайшие пути от исходного узла до всех других узлов, возвращенных как векторный массив или массив ячеек. Это возвращено как вектор, если вы задаете целевой узел. Каждый номер представляет индекс узла в графике.
pred — Узлы-предшественники кратчайших путейУзлы-предшественники кратчайших путей, возвращенных как вектор.
Можно использовать pred определить кратчайшие пути от исходного узла до всех других узлов. Предположим, что у вас есть ориентированный граф с 6 узлами.
Функция находит, что кратчайшим путем от узла 1 к узлу 6 является path = [1 5 4 6] и pred = [0 6 5 5 1 4]. Теперь можно определить кратчайшие пути из узла 1 к любому другому узлу в рамках графика путем индексации в pred. Например, чтобы выяснить кратчайший путь от узла 1 к узлу 2, можно запросить pred с целевым узлом как первый запрос затем используйте данный ответ, чтобы получить следующий узел. Повторите эту процедуру, пока ответ запроса не 0, который указывает на исходный узел.
pred(2) = 6; pred(6) = 4; pred(4) = 5; pred(5) = 1; pred(1) = 0;
1->5->4->6->2.
[1] Дейкстра, E. W. "Примечание по Двум проблемам в Связи с Графиками". Numerische Mathematik. Издание 1, Номер 1, 1959, стр 269–271.
[2] Белман, R. "На проблеме Маршрутизации". Ежеквартально Прикладной математики. Издание 16, Номер 1, стр 87–90.
[3] Siek, J. G. Л. К. Ли и А. Ламсдэйн. Библиотека графика повышения: руководство пользователя и справочник. Верхний Сэддл-Ривер, NJ: образование Пирсона, 2002.
graphallshortestpaths | graphconncomp | graphisdag | graphisomorphism | graphisspantree | graphmaxflow | graphminspantree | graphpred2path | graphtopoorder | graphtraverse | shortestpath
