PID Tuner обеспечивает два типа структур модели для представления динамики объекта: модели процессов и модели в пространстве состояний.
Используйте свое знание характеристик системы и уровень точности, требуемой вашим приложением выбрать структуру модели. В отсутствие любой предшествующей информации можно получить некоторое понимание порядка динамики и задержек путем анализа экспериментально полученного переходного процесса и частотной характеристики системы. Для получения дополнительной информации смотрите следующее в документации System Identification Toolbox™:
Модели корреляции (System Identification Toolbox)
Модели частотной характеристики (System Identification Toolbox)
Каждая структура модели, которую вы выбираете, сопоставила динамические элементы или model parameters. Вы настраиваете значения этих параметров вручную или автоматически найти идентифицированную модель, которая дает к удовлетворительному соответствию вашим измеренным данным или данным о симулированном отклике. Во многих случаях, когда вы не уверены в лучшей структуре, чтобы использовать, она помогает запуститься с самой простой структуры модели, передаточной функции с одним полюсом. Можно прогрессивно пробовать идентификацию структурами высшего порядка до удовлетворительного соответствия между ответом объекта, и измеренный выход достигается. Структура модели в пространстве состояний позволяет автоматический поиск оптимального порядка модели на основе анализа данных ввода - вывода.
Когда вы начинаете идентификационную задачу объекта, структура модели передаточной функции с одним действительным полюсом выбрана по умолчанию. Это настроенное значение по умолчанию не чувствительно к природе данных и не может быть подходящим вариантом для вашего приложения. Поэтому рекомендуется, чтобы вы выбрали подходящую структуру модели прежде, чем выполнить идентификацию параметра.
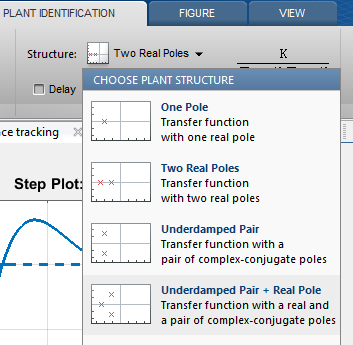
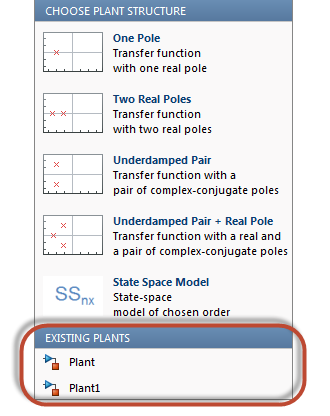
Модели процессов являются передаточными функциями с 3 или меньшим количеством полюсов и могут быть увеличены сложением нуля, задержки и элементов интегратора. Модели процессов параметрируются параметрами модели, представляющими постоянные времени, усиление и задержку. В PID Tuner выберите модель процесса во вкладке Plant Identification с помощью меню Structure.
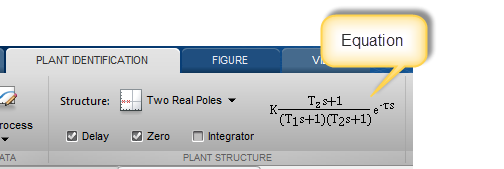
Для любой выбранной структуры можно опционально добавить задержку, нуль и/или элемент интегратора с помощью соответствующих флажков. Передаточная функция модели, сконфигурированная этим выбором, отображена рядом с меню Structure.
Самая простая доступная модель процесса является передаточной функцией с одним действительным полюсом и никаким нулем или элементами задержки:
Эта модель задана параметрами K, усиление и T 1, первая постоянная времени. Самая комплексная структура модели процесса выбирает, имеет три полюса, дополнительный интегратор, нуль и задержку, такие как следующая модель, которая имеет один действительный полюс и одну комплексно-сопряженную пару полюсов:
В этой модели конфигурируемые параметры включают постоянные времени, сопоставленные с полюсами и нулем, T 1, Tω и Tz. Другие параметры являются коэффициентом демпфирования ζ, усиление K и τ с временной задержкой.
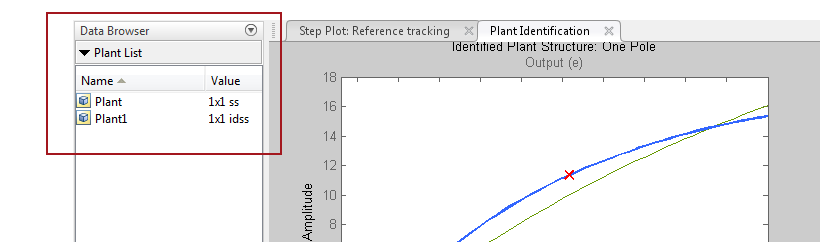
Когда вы выбираете тип модели процесса, PID Tuner автоматически вычисляет начальные значения для параметров объекта и отображает график, показывающий и предполагаемый ответ модели и ваши измеренные или симулированные данные. Можно отредактировать значения параметров графически с помощью индикаторов на графике, или численно с помощью редактора Параметров Объекта. Для примера, иллюстрирующего этот процесс, смотрите В интерактивном режиме Оценочные Параметры Объекта из Данных об Ответе.
Следующая таблица обобщает различные параметры, которые задают доступные типы моделей процессов.
| Параметр | Используемый | Описание |
|---|---|---|
| K Усиление | Все передаточные функции | Может принять любое действительное значение. В графике перетащите кривую отклика объекта (синюю) или вниз настраивать K. |
| T 1 — Первая постоянная времени | Передаточная функция с одним или несколькими действительными полюсами | Может принять любое значение между 0 и T, отрезок времени измеренных или симулированных данных. В графике перетащите красный x, оставленный (по направлению к нулю) или право (к T), чтобы настроить T 1. |
| T 2 — Во второй раз постоянный | Передаточная функция с двумя действительными полюсами | Может принять любое значение между 0 и T, отрезок времени измеренных или симулированных данных. В графике перетащите пурпурный x оставленный (по направлению к нулю) или право (к T), чтобы настроить T 2. |
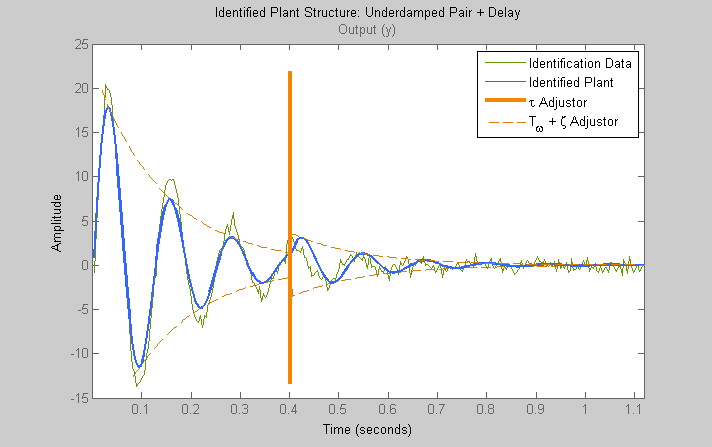
| Tω — Постоянная времени сопоставила с собственной частотой ωn, где Tω = 1/ωn | Передаточная функция с underdamped парой (комплексно-сопряженная пара) полюсов | Может принять любое значение между 0 и T, отрезок времени измеренных или симулированных данных. В графике перетащите одну из оранжевых огибающих ответа, оставленных (по направлению к нулю) или право (к T), чтобы настроить Tω. |
| ζ — Коэффициент демпфирования | Передаточная функция с underdamped парой (комплексно-сопряженная пара) полюсов | Может принять любое значение между 0 и 1. В графике перетащите одну из оранжевых огибающих ответа, оставленных (по направлению к нулю) или право (к T), чтобы настроить ζ. |
| τ — Транспортная задержка | Любая передаточная функция | Может принять любое значение между 0 и T, отрезок времени измеренных или симулированных данных. В графике перетащите оранжевую вертикальную панель, оставленную (по направлению к нулю) или право (к T), чтобы настроить τ. |
| Tz Нуль модели | Любая передаточная функция | Может принять любое значение между –T и T, отрезком времени измеренных или симулированных данных. В графике перетащите красный оставленный круг (к –T) или право (к T), чтобы настроить Tz. |
| Интегратор | Любая передаточная функция | Добавляет фактор 1/s к передаточной функции. Нет никакого связанного параметра, чтобы настроить. |
Структура модели в пространстве состояний для идентификации, в основном, задана выбором количества состояний, model order. Используйте структуру модели в пространстве состояний, когда модели высшего порядка, чем поддержанные структурами модели процесса потребуются, чтобы достигать удовлетворительного соответствия к вашим измеренным или симулированным данным о вводе-выводе. В структуре модели в пространстве состояний системные движущие силы представлены выходными уравнениями и состоянием:
x является вектором из переменных состояния, автоматически выбранных программным обеспечением на основе выбранного порядка модели. u представляет входной сигнал и y выходные сигналы.
Чтобы использовать структуру модели в пространстве состояний, во вкладке Plant Identification, в меню Structure, выбирают State-Space Model. Затем нажмите Configure Structure, чтобы открыть диалоговое окно State-Space Model Structure.
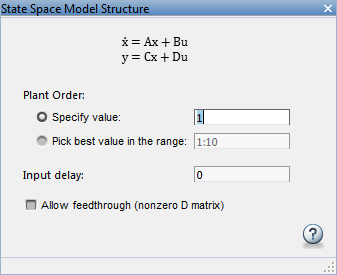
Используйте диалоговое окно, чтобы задать порядок модели, задержку и проходные характеристики. Если вы не уверены в порядке, выберите Pick best value in the range и введите область значений порядков. В этом случае, когда вы нажимаете Estimate во вкладке Plant Estimation, программное обеспечение отображает столбчатую диаграмму сингулярных значений Ганкеля. Выберите порядок модели, равный количеству сингулярных значений Ганкеля, которые делают значительные вклады в системную динамику.
Когда вы выбираете структуру модели в пространстве состояний, идентификационный график показывает ответу объекта (синюю) кривую, только если существует допустимая предполагаемая модель. Например, если вы изменяете структуру после оценки модели процесса, пространство состояний, эквивалентное из предполагаемой модели, отображено. Если вы изменяете порядок модели, кривая отклика объекта исчезает, пока новая оценка не выполняется.
При использовании структуры модели в пространстве состояний вы не можете непосредственно взаимодействовать с параметрами модели. Идентифицированная модель должна таким образом быть рассмотрена неструктурированной без физического смысла, присоединенного к переменным состояния модели.
Однако можно графически настроить входную задержку и полное усиление модели. То, когда вы выбираете модель в пространстве состояний с задержкой, задержка представлена на графике вертикальной оранжевой панели, показывают на графике. Перетащите эту панель горизонтально, чтобы изменить значение задержки. Перетащите ответ объекта (синяя) кривая вверх и вниз, чтобы настроить усиление модели.
Любые ранее импортированные или идентифицированные модели объекта управления перечислены раздел Plant List Браузера Данных.
Можно задать структуру модели и инициализировать значения параметра модели с помощью одного из этих объектов. Для этого во вкладке Plant Identification, в меню Structure, выбирают линейную модель объекта управления, вы хотите использовать для структуры инициализацию.
Если объект, который вы выбираете, является моделью процесса (idproc Объект (System Identification Toolbox)), PID Tuner использует свою структуру. Если объект является каким-либо другим типом модели, PID Tuner использует структуру модели в пространстве состояний.
Когда вы переключаетесь от одной структуры модели до другого, программное обеспечение сохраняет характеристики модели (местоположения полюса/нуля, усиление, задержка) так же как возможные. Например, когда вы переключаетесь от однополюсной модели до модели 2D полюса, существующие значения T 1, Tz, τ и K сохраняются, T 2 инициализирован к значению по умолчанию (или ранее присвоен, если таковые имеются), значение.
Если вы выбрали структуру модели, у вас есть несколько опций для вручную или автоматически настраивающий значения параметров, чтобы достигнуть хорошего соответствия между предполагаемым ответом модели и вашими измеренными или симулированными данными о вводе/выводе. Для примера, который иллюстрирует все эти опции, см.:
В интерактивном режиме оцените параметры объекта из данных об ответе (Control System Toolbox™)
В интерактивном режиме оцените объект от измеренного или данных о симулированном отклике (Simulink Control Design) Simulink® Control Design™),
PID Tuner не выполняет умную инициализацию параметров модели, когда структура модели выбрана. Скорее начальные значения параметров модели, отраженных в графике, произвольно выбраны середина значений области значений. Если вам нужна хорошая начальная точка прежде вручную настроить значения параметров, используйте опцию Initialize and Estimate от вкладки Plant Identification.
В некоторых случаях отклик системы строго под влиянием начальных условий. Таким образом описание входа, чтобы вывести отношение в форме передаточной функции недостаточно, чтобы соответствовать наблюдаемым данным. Это особенно верно для систем, содержащих слабо ослабленные режимы. PID Tuner позволяет вам оценивать начальные условия в дополнение к параметрам модели, таким образом, что сумма начального ответа условия и входного ответа совпадает с наблюдаемым выходным сигналом хорошо. Используйте диалоговое окно Estimation Options, чтобы задать, как начальные условия должны быть обработаны во время автоматической оценки. По умолчанию начальная обработка условия (зафиксировать ли к нулевым значениям или оценить) автоматически выполняется алгоритмом оценки. Однако можно осуществить определенный выбор при помощи меню Initial Conditions.
Начальные условия могут только быть оценены с автоматической оценкой. В отличие от параметров модели, они не могут быть изменены вручную. Однако когда-то оцененный они остаются фиксированными к своим ориентировочным стоимостям, если структура модели не изменяется, или новые идентификационные данные импортируется.
Если вы измените параметры модели, то выполнив автоматическую оценку, ответ модели покажет фиксированный вклад (т.е. независимый от параметров модели) от начальных условий. В следующем графике эффекты начальных условий были идентифицированы, чтобы быть особенно значительными. Когда задержка настроена впоследствии, фрагмент ответа слева от входного маркера задержки (Корректор τ) прибывает просто из начальных условий. Фрагмент справа от Корректора τ содержит эффекты обоих входной сигнал, а также начальные условия.