Проект фильтра Калмана, Оценка состояния фильтра Калмана
[kest,L,P] = kalman(sys,Qn,Rn,Nn)
[kest,L,P] = kalman(sys,Qn,Rn,Nn,sensors,known)
[kest,L,P,M,Z] = kalman(sys,Qn,Rn,...,type)
kalman проектирует средство оценки состояния Фильтра Калмана или Кальмана, учитывая модель в пространстве состояний объекта и данных о ковариации шума процесса и измерения. Оценка состояния фильтра Калмана предоставляет оптимальное решение следующих непрерывных или дискретных проблем оценки.
Оценка непрерывного времени
Учитывая непрерывный объект
с известными входными параметрами u, белый шум процесса w и белый шум измерения удовлетворение v
создайте оценку состояния это минимизирует установившуюся ошибочную ковариацию
Оптимальным решением является Фильтр Калмана уравнениями
Усиление фильтра L определяется путем решения алгебраического уравнения Riccati, чтобы быть
где
и P решает соответствующее алгебраическое уравнение Riccati.
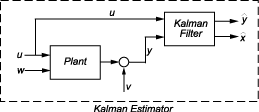
Средство оценки использует известные входные параметры u и измерения y, чтобы сгенерировать выход и оценки состояния и . Обратите внимание на то, что оценивает истинный объект выход
Оценка дискретного времени
Учитывая дискретный объект
и шумовые данные о ковариации
Средство оценки имеет следующее уравнение состояния:
Матрица усиления L выведена путем решения дискретного уравнения Riccati, чтобы быть
где
Существует два варианта Оценок состояния фильтра Калмана дискретного времени:
Текущее средство оценки генерирует выходные оценки и оценки состояния использование всех доступных измерений до . Это средство оценки имеет выходное уравнение
где инновации получают Mx, и My заданы как:
Mx обновляет предсказание использование нового измерения .
Когда H = 0, и .
Задержанное средство оценки генерирует выходные оценки и оценки состояния использование измерений только до yv [n –1]. Это средство оценки легче реализовать внутренние циклы управления и имеет выходное уравнение
[kest,L,P] = kalman(sys,Qn,Rn,Nn) создает модель в пространстве состояний kest из Оценки состояния фильтра Калмана, учитывая модель объекта управления sys и шумовые данные о ковариации Qn, Rn, Nn (матрицы Q, R, N, описанный в Описании). sys должна быть модель в пространстве состояний с матрицами .
Получившееся средство оценки kest имеет входные параметры и выходные параметры (или их дубликаты дискретного времени). Можно не использовать последний входной параметр Nn когда N = 0.
Функциональный kalman решает и непрерывные и дискретные проблемы и производит непрерывное средство оценки когда sys непрерывно и дискретное средство оценки в противном случае. В непрерывное время, kalman также возвращается, Кальман получают L и установившаяся ошибочная ковариационная матрица PP решает связанное уравнение Riccati.
[kest,L,P] = kalman(sys,Qn,Rn,Nn,sensors,known) обрабатывает более общую ситуацию когда
Не все выходные параметры sys измеряются.
Входные параметры воздействия w не являются последними входными параметрами sys.
Векторы индекса sensors и known задайте который выходные параметры y sys измеряются и который вводит u, известны (детерминированные). Все другие входные параметры sys приняты стохастические.
[kest,L,P,M,Z] = kalman(sys,Qn,Rn,...,type) задает тип средства оценки для объектов дискретного времени sys. type аргументом является любой 'current' (значение по умолчанию) или 'delayed'. Для объектов дискретного времени, kalman возвращает средство оценки, и инновации получают L и M и установившиеся ошибочные ковариации
См. Проект LQG для оси X и Кальмана Филтеринга для примеров, которые используют kalman функция.
Объект и шумовые данные должны удовлетворить:
(C, A) обнаруживаемый
и
не имеет никакого неконтролируемого режима на мнимой оси (или модульный круг в дискретное время) с обозначением
[1] Франклин, G.F., степень доктора юридических наук Пауэлл и M.L. Рабочий, цифровое управление динамических систем, второго выпуска, Аддисона-Уэсли, 1990.
[2] Льюис, F., оптимальная оценка, John Wiley & Sons, Inc, 1986.
[3] Deshpande, A.S., "Устраняя Разрыв в Прикладном Кальмане Филтеринге: Оценка Выводит, Когда Измерения Коррелируются с Шумом Процесса". Журнал Систем управления IEEE, Издание 37, Номер 3, 2017, стр 87–93.
care | dare | estim | extendedKalmanFilter | Kalman Filter | kalmd | lqg | lqgreg | ss | unscentedKalmanFilter
