Control System Toolbox™ предлагает несколько дискретизаций и методов интерполяции для преобразования моделей динамической системы между непрерывным временем и дискретным временем и для передискретизации моделей дискретного времени. Некоторые методы имеют тенденцию обеспечивать лучшее соответствие частотного диапазона между исходными и конвертированными системами, в то время как другие обеспечивают лучшее соответствие во временном интервале. Используйте следующую таблицу, чтобы помочь выбрать метод, который является лучшим для вашего приложения.
| Метод дискретизации | Используйте когда |
|---|---|
| Нулевой порядок содержит | Вы хотите точную дискретизацию во временном интервале для входных параметров лестницы. |
| Хранение первого порядка | Вы хотите точную дискретизацию во временном интервале для кусочных линейных входных параметров. |
| Отображение импульсного инварианта (только непрерывное-к-дискретному преобразование) | Вы хотите точную дискретизацию во временном интервале для импульса, обучают входные параметры. |
| Приближение Тастина |
|
| Нулевое полюсное соответствие с эквивалентами |
|
| Наименьшие квадраты (только непрерывное-к-дискретному преобразование) |
|
Для получения информации о том, как задать метод преобразования в командной строке, смотрите c2d, d2c, и d2d. Можно экспериментировать в интерактивном режиме с различными методами дискретизации в Live Editor, использующем задачу Уровня Модели Преобразования.
Метод Хранения Нулевого Порядка (ZOH) обеспечивает точное совпадение между непрерывным - и системами дискретного времени во временном интервале для входных параметров лестницы.
Следующая блок-схема иллюстрирует, что дискретизация "нулевой порядок содержит" Hd (z) непрерывной линейной модели H (s).
Блок ZOH генерирует входной сигнал непрерывного времени u (t) путем содержания каждого демонстрационного значения u (k), постоянный за один период расчета:
u сигнала (t) является входом к непрерывной системе H (s). Выход y [k] результаты выборки y (t) каждый Ts секунды.
С другой стороны, учитывая дискретную систему Hd (z), d2c создает непрерывную систему H (s). Дискретизация ZOH H (s) совпадает с Hd (z).
Дискретное-к-непрерывному преобразование ZOH имеет нижеследующие ограничения:
d2c не может преобразовать модели LTI с полюсами в z = 0.
Для моделей LTI дискретного времени, имеющих отрицательные действительные полюса, ZOH d2c преобразование создает непрерывную систему с высшим порядком. Порядок модели увеличивается, потому что отрицательный действительный полюс в области z сопоставляет с чистым мнимым значением в области s. Такое отображение приводит к модели непрерывного времени с комплексными данными. Чтобы избежать этой проблемы, программное обеспечение вместо этого вводит сопряженную пару комплексных полюсов в области s. Смотрите Преобразуют Систему Дискретного времени в Непрерывное Время для примера.
Можно использовать метод ZOH, чтобы дискретизировать SISO или модели непрерывного времени MIMO с задержками. Метод ZOH дает к точной дискретизации для систем с входными задержками, выходными задержками или транспортными задержками.
Для систем с внутренними задержками (задерживается в обратной связи), результаты метода ZOH в аппроксимированных дискретизациях. Следующая фигура иллюстрирует систему с внутренней задержкой.
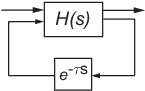
Для таких систем, c2d выполняет следующие действия, чтобы вычислить аппроксимированную дискретизацию ZOH:
Анализирует задержку τ как с .
Поглощает дробную задержку в H (s).
Дискретизирует H (s) к H (z).
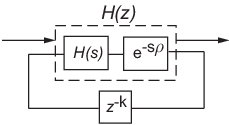
Представляет целочисленный фрагмент задержки kTs как внутренняя задержка дискретного времени z –k. Финал дискретизированная модель появляется в следующем рисунке:
Метод Хранения первого порядка (FOH) обеспечивает точное совпадение между непрерывным - и системами дискретного времени во временном интервале для кусочных линейных входных параметров.
FOH отличается от ZOH базовым механизмом хранения. Чтобы повернуть входные выборки u [k] в непрерывный вход u (t), FOH использует линейную интерполяцию между выборками:
В общем случае этот метод более точен, чем ZOH для систем, управляемых сглаженными входными параметрами.
Этот метод FOH отличается от стандартного причинного FOH и более соответственно called triangle approximation (см. [2], p. 228). Метод также известен как инвариантное пандусом приближение.
Можно использовать метод FOH, чтобы дискретизировать SISO или модели непрерывного времени MIMO с задержками. Метод FOH обрабатывает задержки таким же образом как метод ZOH. См. Метод ZOH для Систем с Задержками.
Инвариантное импульсом отображение производит модель дискретного времени с той же импульсной характеристикой как непрерывная система времени. Например, сравните импульсную характеристику непрерывной системы первого порядка с инвариантной импульсом дискретизацией:
G = tf(1,[1,1]);
Gd1 = c2d(G,0.01,'impulse');
impulse(G,Gd1)![]()
График импульсной характеристики показывает, что импульсные характеристики непрерывных и дискретизированных систем соответствуют.
Можно использовать отображение импульсного инварианта, чтобы дискретизировать SISO или модели непрерывного времени MIMO с задержками, за исключением того, что метод не поддерживает ss модели с внутренними задержками. Для поддерживаемых моделей инвариантное импульсом отображение дает к точной дискретизации задержки.
Тастин или билинейное приближение дают к лучшему соответствию частотного диапазона между непрерывным временем и дискретизированными системами. Этот метод связывает s - область и z - доменные передаточные функции с помощью приближения:
В c2d преобразования, дискретизация Hd (z) непрерывной передаточной функции H (s):
Точно так же d2c преобразование использует обратное соответствие
Когда вы преобразуете модель в пространстве состояний с помощью метода Тастина, состояния не сохраняются. Преобразование состояния зависит от матриц пространства состояний и имеет ли система задержки. Например, для явного (E = I) модель непрерывного времени без задержек, вектор состояния w [k] дискретизированной модели связан с вектором состояния непрерывного времени x (t):
Ts является шагом расчета модели дискретного времени. A и B являются матрицами пространства состояний модели непрерывного времени.
Приближение Тастина не задано для систем с полюсами в z = –1 и плохо обусловлено для систем с полюсами около z = –1.
Если ваша система имеет важную динамику на особой частоте, которую вы хотите, чтобы преобразование сохранило, можно использовать метод Тастина с предварительным деформированием частоты. Этот метод гарантирует соответствие между непрерывным - и ответами дискретного времени на частоте перед деформацией.
Приближение Тастина с предварительным деформированием частоты использует следующее преобразование переменных:
Эта замена переменной гарантирует соответствие непрерывного - и частотные характеристики дискретного времени на частоте перед деформацией ω из-за следующего соответствия:
Можно использовать приближение Тастина, чтобы дискретизировать SISO или модели непрерывного времени MIMO с задержками.
По умолчанию метод Тастина округляет любую задержку до самого близкого кратного шаг расчета. Поэтому для любого tau с временной задержкой, целочисленный фрагмент задержки, k*Ts, карты к задержке k выборка периодов в дискретизированной модели. Этот подход игнорирует остаточную дробную задержку, tau
-
k*Ts.
Вы можете, чтобы аппроксимировать дробный фрагмент задержки дискретным фильтром все-передачи (фильтр Thiran) заданного порядка. Для этого используйте FractDelayApproxOrder опция c2dOptions. Смотрите Улучшают Точность Дискретизированной Системы с Задержкой примера.
Чтобы изучить, как метод Тастина обрабатывает системы с задержками, считайте следующую модель в пространстве состояний SISO G (s). Модель ввела, задерживают τi, выводят, задерживают τo и внутреннюю задержку τ.
![]()
Следующий рисунок показывает общий результат дискретизации G (s) с помощью метода Тастина.
![]()
По умолчанию, c2d преобразует задержки в чистые целочисленные задержки. c2d команда вычисляет целочисленные задержки путем округления каждой задержки к самому близкому кратному шаг расчета Ts. Таким образом, в случае по умолчанию, mi = вокруг (τi/Ts), mo = round(τo/Ts), и m = round(τ/Ts).. Также в этом случае, Fi (z) = Fo (z) = F (z) = 1.
Если вы устанавливаете FractDelayApproxOrder к ненулевому значению, c2d аппроксимирует дробный фрагмент задержек фильтрами Thiran Fi (z), Fo (z) и F (z).
Фильтры Thiran добавляют дополнительные состояния в модель. Максимальным количеством дополнительных состояний для каждой задержки является FractDelayApproxOrder.
Например, для входа задерживают τi, порядок фильтра Thiran, который Fi (z):
order(Fi (z)) = maxпотолок(τi/Ts), FractDelayApproxOrder).
Если ceil(τi/Ts) <FractDelayApproxOrder, фильтр Thiran Fi (z) аппроксимирует целый вход, задерживает τi. Если ceil(τi/Ts)> FractDelayApproxOrder, Thiran фильтруют, только аппроксимирует фрагмент входной задержки. В этом случае, c2d представляет остаток от входной задержки как цепь единичных задержек z–mi, где
mi = ceil(τi/Ts) – FractDelayApproxOrder
c2d использование фильтры Thiran и FractDelayApproxOrder похожим способом аппроксимировать выход задерживают τo и внутреннюю задержку τ.
Когда вы дискретизируетеtf и zpk модели с помощью метода Тастина, c2d сначала агрегировал весь вход, выход и транспортные задержки в одну транспортную задержку ИТОГ τ для каждого канала. c2d затем аппроксимирует ИТОГ τ как фильтр Thiran и цепь единичных задержек таким же образом как описано для каждой из задержек ss модели.
Для получения дополнительной информации о фильтрах Thiran, смотрите thiran страница с описанием и [4].
Этот метод преобразования, которое вычисляет нулевые полюсные эквиваленты соответствия, применяется только к системам SISO. Непрерывные и дискретизированные системы имеют соответствие с усилениями DC. Их полюса и нули связаны преобразованием:
где:
zi является i th полюс или нуль системы дискретного времени.
si является i th полюс или нуль системы непрерывного времени.
Ts является шагом расчета.
См. [2] для получения дополнительной информации.
Можно использовать нулевое полюсное соответствие, чтобы дискретизировать модели непрерывного времени SISO с задержкой, за исключением того, что метод не поддерживает ss модели с внутренними задержками. Нулевой полюсный метод сопоставления обрабатывает задержки таким же образом как приближение Тастина. Смотрите Приближение Тастина для Систем с Задержками.
Метод наименьших квадратов минимизирует ошибку между частотными характеристиками систем непрерывного времени и дискретного времени до частоты Найквиста с помощью векторно подходящего подхода оптимизации. Этот метод полезен, когда это необходимо, чтобы получить быструю системную динамику, но должен использовать больший шаг расчета, например, когда вычислительные ресурсы ограничиваются.
Этот метод поддерживается только c2d функционируйте и только для систем SISO.
Как приближением Тастина и нулевым полюсным соответствием, метод наименьших квадратов обеспечивает хорошее соответствие между частотными характеристиками исходной системы непрерывного времени и конвертированной системы дискретного времени. Однако при использовании метода наименьших квадратов с:
Тот же шаг расчета как приближение Тастина или нулевое полюсное соответствие, вы получаете меньшее различие между частотными характеристиками непрерывного времени и дискретного времени.
Более низкий шаг расчета, чем, что вы использовали бы приближением Тастина или нулевым полюсным соответствием, можно все еще получить результат, который удовлетворяет требования. Выполнение так полезно, если вычислительные ресурсы ограничиваются, поскольку более медленный шаг расчета означает, что процессор должен сделать меньше, работают.
[1] Åström, К.Дж. и Б. Виттенмарк, Управляемые компьютером Системы: Теория и Проект, Prentice Hall, 1990, стр 48-52.
[2] Франклин, G.F., Пауэлл, D.J., и рабочий, М.Л., цифровое управление динамических систем (3-й выпуск), Prentice Hall, 1997.
[3] Смит, J.O. III, "импульсный метод инварианта", физическая обработка звукового сигнала, август 2007. https://www.dsprelated.com/dspbooks/pasp/Impulse_Invariant_Method.html.
[4] Т. Лааксо, В. Вэлимэки, "Разделяя Unit Delay", Журнал Обработки сигналов IEEE, Издание 13, № 1, p.30-60, 1996.
c2d | c2dOptions | d2c | d2cOptions | d2d | d2dOptions | thiran