

Создайте мертво-зональный объект средства оценки нелинейности
NL = deadzone
NL = deadzone('ZeroInterval',[a,b])
NL = deadzone[NaN NaN]. Начальное значение нулевого интервала определяется из области значений данных об оценке, во время использования оценки nlhw. Используйте запись через точку, чтобы настроить свойства объектов в случае необходимости.
NL = deadzone('ZeroInterval',[a,b])[a,b].
В качестве альтернативы используйте NL = deadzone([a,b]).
deadzone объект, который хранит мертво-зональное средство оценки нелинейности для оценки моделей Хаммерстайна-Винера.
Использование deadzone задавать нелинейную функцию , где y и x являются скалярами, и θ представляет параметры a и b, которые задают нулевой интервал.
Мертво-зональная функция нелинейности имеет следующие характеристики:
Например, в следующем графике, мертвая зона находится в интервале [-4,4].
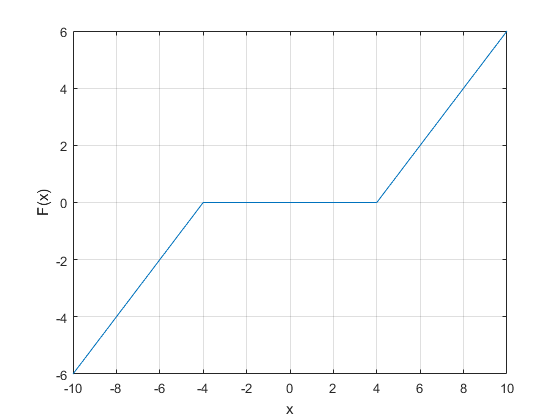
Значение F(x) вычисляется evaluate(NL,x), где NL deadzone объект.
Для deadzone свойства объектов, смотрите Свойства.
NL = deadzone;
Задайте нулевой интервал.
NL.ZeroInterval = [-4,5];
Загрузите данные об оценке.
load twotankdata; z = iddata(y,u,0.2,'Name','Two tank system'); z1 = z(1:1000);
Создайте deadzone объект, и задает исходное предположение для нулевого интервала.
OutputNL = deadzone('ZeroInterval',[-0.1 0.1]);Оценочная модель без входной нелинейности.
m = nlhw(z1,[2 3 0],[],OutputNL);
Загрузите данные об оценке.
load motorizedcamera;Создайте iddata объект.
z = iddata(y,u,0.02,'Name','Motorized Camera','TimeUnit','s');
z iddata объект с 6 входными параметрами и 2 выходными параметрами.
Задайте порядки модели и задержки.
Orders = [ones(2,6),ones(2,6),ones(2,6)];
Задайте то же средство оценки нелинейности для каждого входного канала.
InputNL = saturation;
Задайте различные средства оценки нелинейности для каждого выходного канала.
OutputNL = [deadzone,wavenet];
Оцените модель Хаммерстайна-Винера.
sys = nlhw(z,Orders,InputNL,OutputNL);
Чтобы видеть форму предполагаемой нелинейности ввода и вывода, постройте нелинейность.
plot(sys)

Нажмите на блоки нелинейности ввода и вывода на верхней части графика видеть нелинейность.
|
Нулевой интервал мертвой зоны в виде вектора-строки с 2 элементами из удваивается. Значение по умолчанию: |