Создайте расширенный объект Фильтра Калмана для онлайновой оценки состояния
obj = extendedKalmanFilter(StateTransitionFcn,MeasurementFcn,InitialState)StateTransitionFcn функция, которая вычисляет состояние системы во время k, учитывая вектор состояния во время k-1. MeasurementFcn функция, которая вычисляет выходное измерение системы во время k, учитывая состояние во время k. InitialState задает начальное значение оценок состояния.
После создания объекта используйте correct и predict команды, чтобы обновить оценки состояния и ошибочные значения ковариации оценки состояния с помощью дискретного времени первого порядка расширили алгоритм Фильтра Калмана и данные реального времени.
obj = extendedKalmanFilter(StateTransitionFcn,MeasurementFcn,InitialState,Name,Value)Name,Value парные аргументы.
obj = extendedKalmanFilter(StateTransitionFcn,MeasurementFcn)predict и correct команды, задайте значения начального состояния с помощью записи через точку. Например, для системы с двумя состояниями со значениями начального состояния [1;0], задайте obj.State = [1;0].
obj = extendedKalmanFilter(StateTransitionFcn,MeasurementFcn,Name,Value)Name,Value парные аргументы. Перед использованием predict и correct команды, задайте значения начального состояния с помощью Name,Value парные аргументы или запись через точку.
obj = extendedKalmanFilter(Name,Value)Name,Value парные аргументы. Перед использованием predict и correct команды, задайте функцию изменения состояния, функцию измерения и значения начального состояния с помощью Name,Value парные аргументы или запись через точку.
extendedKalmanFilter создает объект для онлайновой оценки состояния дискретного времени, нелинейная система с помощью дискретного времени первого порядка расширила алгоритм Фильтра Калмана.
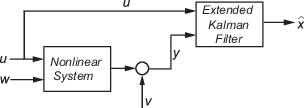
Считайте объект с состояниями x, входом u, выходом y, шум процесса w и шум измерения v. Примите, что можно представлять объект как нелинейную систему.
Алгоритм вычисляет оценки состояния из нелинейной системы с помощью функций изменения состояния и измерения задан вами. Программное обеспечение позволяет вам задать шум в этих функциях как дополнение или недополнение:
Аддитивные Шумовые Условия — изменение состояния и уравнения измерений имеют следующую форму:
Здесь f является нелинейной функцией изменения состояния, которая описывает эволюцию состояний x от одного временного шага до следующего. Нелинейная функция измерения h связывает x к измерениям y на временном шаге kW и v нулевое среднее значение, некоррелированые шумы процесса и измерения, соответственно. Эти функции могут также иметь дополнительные входные параметры, которые обозначаются us и um в уравнениях. Например, дополнительные аргументы могли быть временным шагом k или входные параметры u к нелинейной системе. Может быть несколько таких аргументов.
Обратите внимание на то, что шумовые условия в обоих уравнениях являются дополнением. Таким образом, x(k) линейно связан с шумом процесса w(k-1), и y(k) линейно связан с шумом измерения v(k).
Неаддитивные Шумовые Условия — программное обеспечение также поддерживает более комплексные функции изменения состояния и измерения, где x состояния [k] и измерение y [k] является нелинейными функциями шума процесса и шума измерения, соответственно. Когда шумовые условия являются недополнением, изменение состояния и уравнение измерений имеют следующую форму:
Когда вы выполняете онлайновую оценку состояния, вы сначала создаете нелинейную функцию изменения состояния f и функция измерения h. Вы затем создаете extendedKalmanFilter объект с помощью этих нелинейных функций, и задает, являются ли шумовые условия дополнением или недополнением. Можно также задать Якобианы функций изменения состояния и измерения. Если вы не задаете их, программное обеспечение численно вычисляет Якобианы.
После того, как вы создадите объект, вы используете predict команда, чтобы предсказать оценку состояния на следующем временном шаге, и correct откорректировать оценки состояния с помощью алгоритма и данных реального времени. Для получения информации об алгоритме смотрите Расширенный и Алгоритмы Сигма-точечного фильтра Калмана для Онлайновой Оценки состояния.
Можно использовать следующие команды с extendedKalmanFilter объекты:
| Команда | Описание |
|---|---|
correct | Откорректируйте ошибочную ковариацию оценки состояния и оценки состояния на временном шаге k с помощью результатов измерений на временном шаге k. |
predict | Предскажите ошибочную ковариацию оценки состояния и оценки состояния во время следующий временной шаг. |
residual | Возвратите различие между фактическими и предсказанными измерениями. |
clone | Создайте другой объект с теми же значениями свойства объекта. Не создавайте дополнительные объекты с помощью синтаксиса |
Для extendedKalmanFilter свойства объектов, смотрите Свойства.
clone | correct | predict | residual | unscentedKalmanFilter