Пакет: lidar.syncImageViewer
Интерфейс, чтобы соединить внешний инструмент с приложением Lidar Labeler
lidar.syncImageViewer.SyncImageViewer класс создает интерфейс между пользовательским инструментом визуализации или анализа и сигналом облака точек в приложении Lidar Labeler. Можно использовать SyncImageViewer класс, чтобы синхронизировать сигналы видео и последовательности изображений к приложению только.
SyncImageViewer задает интерфейс для соединения внешнего инструмента к приложению Lidar Labeler. Внешний инструмент может быть пользовательским инструментом визуализации или пользовательским аналитическим инструментом. Класс, который наследовался SyncImageViewer интерфейс называется client. Клиент выполняет эти задачи:
Синхронизирует внешний инструмент к каждому событию изменения системы координат для определенного сигнала, загруженного в приложение Lidar Labeler. Синхронизация позволяет вам управлять внешним инструментом через ползунок области значений и управление воспроизведением приложения.
Управляет текущим временем во внешнем инструменте и соответствующем отображении в приложении.
Чтобы соединить внешний инструмент с приложением Lidar Labeler, выполните эти шаги:
Задайте клиентский класс, который наследовался lidar.syncImageViewer.SyncImageViewer. Можно использовать SyncImageViewer шаблон класса, чтобы задать класс и реализовать ваш пользовательский инструмент визуализации или анализа. В командной строке MATLAB® введите этот код:
lidar.syncImageViewer.SyncImageViewer.openTemplateInEditor
Сохраните файл к любой папке на пути MATLAB. В качестве альтернативы сохраните файл к папке вне пути MATLAB и добавьте папку в путь MATLAB при помощи addpath функция.
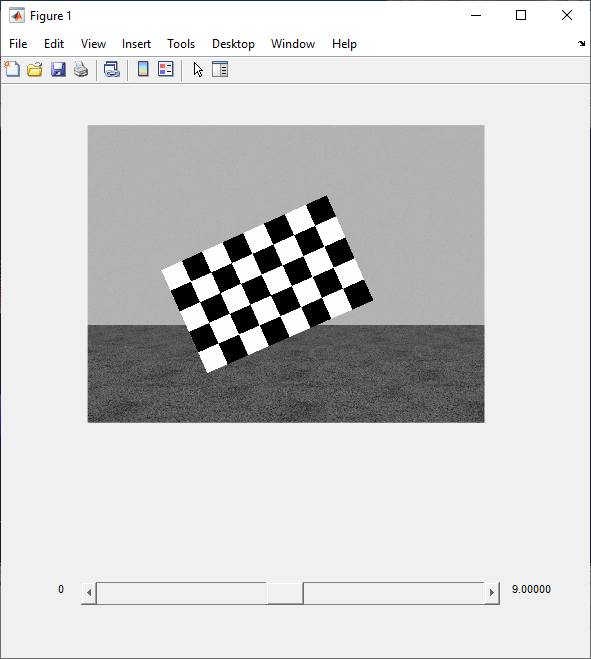
Соедините инструмент отображения изображений с приложением Lidar Labeler. Используйте приложение, и инструмент, чтобы отобразиться синхронизировал лидар и данные изображения.
Задайте источник для данных изображения и лоцируйте данные, чтобы загрузить в приложение.
sourceName = fullfile(toolboxdir('lidar'),'lidardata','lcc', ... 'HDL64','pointCloud');
Отобразите данные изображения в синхронизации с данными о лидаре.
lidarLabeler(sourceName,'SyncImageViewerTargetHandle',@SyncImageDisplay);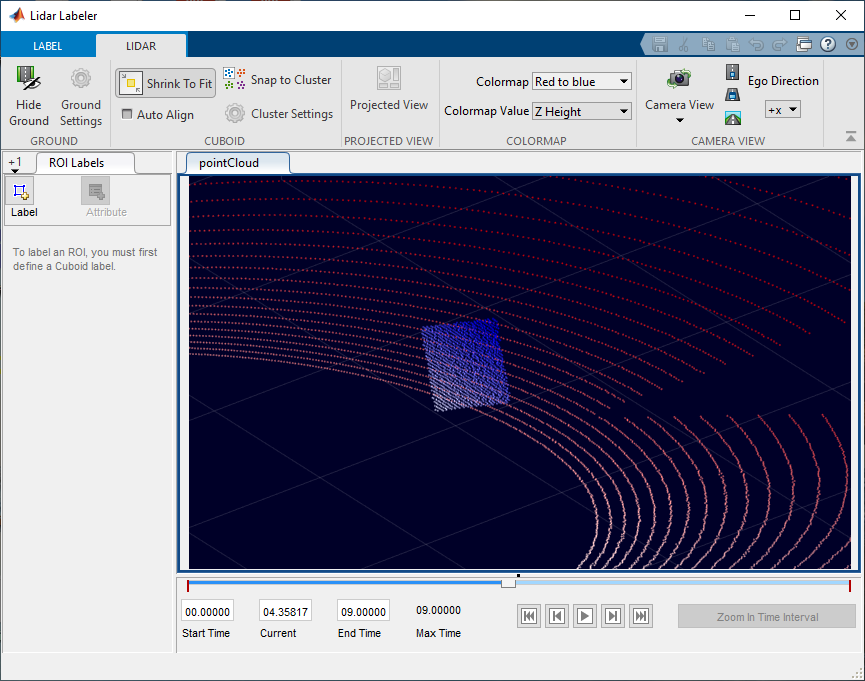
Для примера внешнего инструмента смотрите SyncImageDisplay реализация lidar.syncImageViewer.SyncImageViewer класс. Этот класс реализует инструмент отображения изображений. Можно использовать этот код в качестве начальной точки для создания собственных инструментов.
edit SyncImageDisplay