Векторы сферического базиса в 3х3 матричной форме
Векторы сферического базиса являются локальным набором базисных векторов, которые указывают вдоль радиальных и угловых направлений на любую точку на пробеле.
Векторы сферического базиса в точке (az,el) может быть описан в терминах Декартовых единичных векторов
Этот набор базисных векторов может быть выведен из локального Декартова основания двумя последовательными вращениями: сначала путем вращения Декартовых векторов вокруг y - оси отрицательным углом возвышения, -el, сопровождаемым вращением вокруг z - ось углом азимута, az. Символически, мы можем записать
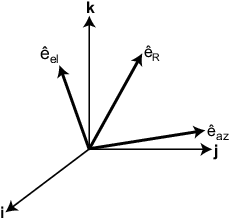
Следующий рисунок показывает отношение между сферическим базисом и локальными Декартовыми единичными векторами.
MATLAB® вычисляет матричный A от уравнений
A = [cosd(el)*cosd(az), -sind(az), -sind(el)*cosd(az); ... cosd(el)*sind(az), cosd(az), -sind(el)*sind(az); ... sind(el), 0, cosd(el)];
