Belt Pulley
Элемент механической передачи с фрикционным поясом перенес окружность шкива
Описание
Блок Belt Pulley представляет шкив, перенесенный в гибкий идеальный, плоский, или V-образный пояс. Идеальный пояс не уменьшается относительно поверхности шкива. Шкив может опционально перевести через порт C, как имеет место в блоке, и займитесь системой.
Модель составляет трение между гибким поясом и периферией шкива. Если сила трения не достаточна, чтобы управлять загрузкой, модель позволяет промах. Отношение между силами в трудных и свободных ветвях соответствует уравнению Эйлера. Модель составляет центробежную загрузку в гибком поясе, инерции шкива и подшипнике трения.
Блок позволяет вам выбирать относительное направление пояса движения. Два конца пояса могут переместиться в равные или противоположные направления. Модель блока принимает несоблюдение в поясе и никаком сопротивлении, чтобы двинуться из-за переноса шкива.
Механическая передача модели уравнений блока между поясом переходит или к/от шкиву. Трудные и свободные ветви используют то же вычисление. Без достаточной силы фрикционной силы недостаточно, чтобы передать степень между шкивом и поясом.
Модель допустима, когда оба конца пояса находятся в силе. Дополнительное предупреждение может отобразиться в Средстве просмотра Simulink® Diagnostic, когда ведущий конец пояса теряет силу. При сборке модели гарантируйте, что сила обеспечена в течение симуляции. Это может быть сделано путем добавления массы в по крайней мере один из концов пояса или путем добавления механизма натяжения в модель. Используйте Переменное Средство просмотра, чтобы гарантировать, что любые пружины присоединили пояс, находятся в силе. Для получения дополнительной информации о создании механизма натяжения смотрите Лучшые практики для Моделирования Сетей Шкива.
Уравнения
Если относительная скорость между поясом и шкивом положительна или нуль, который является , блок Belt Pulley вычисляет силу трения как
Если относительная скорость отрицательна, который является , сила трения вычисляется как
Относительная скорость:
Если тип Пояса установлен в любой V-belt или Flat belt и Centrifugal force установлен в Model centrifugal force, центробежная сила:
где:
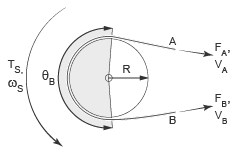
Vrel является относительной скоростью между периферией шкива и поясом.
VA является ветвью линейная скорость.
VB является ветвью B линейная скорость.
VC является шкивом линейная скорость в ее центре. Если шкив не переводит, это значение 0.
ωS является скоростью вращения шкива.
R является радиусом шкива.
Fcentrifugal является поясом центробежная сила.
ρ является поясом линейная плотность.
Ffr является силой трения между шкивом и поясом.
FA является силой, действующей вдоль ветви A.
FB является силой, действующей вдоль ветви B.
f является коэффициентом трения.
θ является контактом, переносят угол.
Для плоского пояса задайте значение f непосредственно в диалоговом окне параметров блоков. Для V-пояса модель вычисляет значение как
где:
Идеализация разрыва в Vrel = 0 является и трудной для решателя решить и не физически точная. Чтобы облегчить эту проблему, коэффициент трения принят, чтобы изменить его значение как функцию относительной скорости, таким образом что
где
μ является мгновенным значением коэффициента трения.
f является установившимся значением коэффициента трения.
Vthr является скоростным порогом трения.
Скоростной порог трения управляет шириной области, в которой коэффициент трения изменяет свое значение от нуля до установившегося максимума. Скоростной порог трения задает скорость, при которой гиперболическая касательная равняется 0.999. Чем меньший значение, тем более крут изменение μ.
Эта сила трения вычисляется как
Получившийся крутящий момент, поставленный шкивом, дан как
где:
TS является крутящим моментом шкива.
b является переносящим вязким затуханием.
Fthr является порогом силы.
Получившаяся сила, порожденная центром шкива:
Допущения и ограничения
Модель не составляет податливость вдоль пояса.
Оба конца пояса обеспечивают соответствующую силу в течение симуляции.
Перевод центра шкива принят, чтобы быть плоским, и перемещения вдоль того, чтобы делить пополам шкива переносят угол. Центральная скорость VC и сила FC только составляет компонент вдоль этой линии движения.
Порты
Соглашение знака таково это, когда Belt direction установлен в Ends move in opposite direction, положительное вращение в порте S имеет тенденцию давать отрицательный перевод для порта A и положительный перевод для порта B.
Сохранение
развернуть все
S — Угловая скорость вала шкива
вращательное механическое устройство
Вращательный порт сохранения сопоставлен с валом шкива.
A — Конец пояса линейная скорость
поступательное механическое устройство
Поступательный порт сохранения, сопоставленный с поясом, заканчивает A.
B — Конец пояса B линейная скорость
поступательное механическое устройство
Поступательный порт сохранения, сопоставленный с поясом, заканчивает B.
C — Центр шкива линейная скорость
поступательное механическое устройство
Поступательный порт сохранения сопоставил со шкивом поступательную скорость. Перемещения шкива в плоскости и вдоль того, чтобы делить пополам шкива переносят угол. Когда относительная скорость положительна, и перевод шкива включен, перемещения центра шкива.
Зависимости
Чтобы осушить этот порт, установите Pulley translation на On.
Параметры
развернуть все
Пояс
Belt type — Модель Belt
Ideal - No slip (значение по умолчанию) | Flat belt | V-belt
Модель Belt:
Ideal - No slip — Смоделируйте идеальный пояс, который не уменьшается относительно шкива.
Flat belt — Смоделируйте пояс с прямоугольным поперечным сечением.
V-belt— Смоделируйте пояс с V-образным поперечным сечением.
Зависимости
Этот параметр влияет на видимость связанных параметров пояса и настроек Contact.
V-belt sheave angle — Угол Sheave
30 deg (значение по умолчанию) | положительная скалярная величина
Угол Sheave V-пояса.
Зависимости
Этот параметр отображается только, когда Belt type установлен в V-belt.
Number of V-belts — Количество поясов
1
Количество V-поясов.
Значения нецелого числа округлены до ближайшего целого числа. Увеличение числа поясов увеличивает силу трения, эффективная масса на единицу длины и максимальная допустимая сила.
Зависимости
Этот параметр отображается только, когда Belt type установлен в V-belt.
Centrifugal force — Центробежная модель силы
Do not model centrifugal force - Suitable for HIL simulation (значение по умолчанию) | Model centrifugal force
Опция, чтобы включать эффекты центробежной силы. Если включено, центробежная сила насыщает приблизительно к 90 процентам значения силы на каждом конце пояса.
Зависимости
Этот параметр отображается только, когда Belt type установлен в Flat belt или V-belt.
Если этот параметр устанавливается на Model centrifugal force, параметр Belt mass per unit length отсоединен.
Belt mass per unit length — Масса на единицу длины
0.6 kg/m (значение по умолчанию) | положительная скалярная величина
Центробежный вклад силы в терминах линейной плотности, описанной как масса на единицу длины.
Зависимости
Выбор Model centrifugal force для Centrifugal force параметр отсоединяет этот параметр.
Belt direction — Начальное направление движения родственника конца пояса
Ends move in opposite direction (значение по умолчанию) | Ends move in same direction
Относительное направление поступательного движения одного пояса заканчивается относительно другого.
Зависимости
Этот параметр отображается только, когда Belt type установлен в Flat belt или V-belt.
Maximum tension — Натяните пороговую модель
No maximum tension (значение по умолчанию) | Specify maximum tension
Натяните пороговую модель. Если Specify maximum tension выбран и натяжение ремня на любом конце пояса встречает или превышает значение, которое вы задаете для Belt maximum tension, симуляция останавливает и генерирует ошибку утверждения.
Зависимости
Выбор Specify maximum tension отсоединяет параметр Belt maximum tension.
Belt maximum tension — Максимальный порог силы
1e5
N (значение по умолчанию) | положительная скалярная величина
Максимальная допустимая сила для каждого пояса. Когда сила на любом конце пояса встречает или превышает это значение, симуляция останавливает и генерирует ошибку утверждения.
Параметр Belt maximum tension отображается только, когда параметр Maximum tension устанавливается на Specify maximum tension.
Tension warning — Слабое пороговое создание отчетов
Do not check tension (значение по умолчанию) | Warn if leading end loses tension
Генерирует ли блок предупреждение когда сила с обоих концов падений пояса, ниже нуля.
Шкив
Pulley translation — Ли к шкиву модели линейное движение
Off (значение по умолчанию) | On
Ли к шкиву модели линейное движение. Установка этого параметра на On отсоединяет порт C.
Pulley radius — Радиус шкива
.15 m (значение по умолчанию) | положительная скалярная величина
Bearing viscous friction coefficient — Подшипник вязкого трения
0 N*m/(rad/s) (значение по умолчанию) | скаляр
Вязкое трение сопоставило с подшипниками, которые содержат ось шкива.
Inertia — Вращательная модель инерции
No inertia (значение по умолчанию) | Specify inertia and initial velocity
Вращательная модель инерции.
Зависимости
Выбор Specify inertia and initial velocity отсоединяет параметры Pulley initial velocity и Pulley inertia.
Pulley inertia — Инерция шкива
0.01 kg*m^2 (значение по умолчанию) | положительная скалярная величина
Вращательная инерция шкива.
Зависимости
Выбор Specify inertia and initial velocity для Inertia параметр отсоединяет этот параметр.
Pulley initial rotational velocity — Начальный шкив вращательная скорость
0 rad/s (значение по умолчанию) | скаляр
Начальная вращательная скорость шкива.
Зависимости
Выбор Specify inertia and initial velocity для Inertia параметр отсоединяет этот параметр.
Pulley mass — Масса шкива
0.01 kg (значение по умолчанию) | положительная скалярная величина
Масса шкива для вычисления инерции.
Зависимости
Выбор Specify inertia and initial velocity для параметра Inertia, когда Pulley translation установлен в On отсоединяет этот параметр.
Pulley initial translational velocity — Начальный шкив вращательная скорость
0 m/s (значение по умолчанию) | скаляр
Начальная поступательная скорость шкива.
Зависимости
Выбор Specify inertia and initial velocity для параметра Inertia, когда Pulley translation установлен в On отсоединяет этот параметр.
Связаться
Свяжитесь настройки только отображаются, если параметр типа Пояса в настройках Belt устанавливается на Flat belt или V-belt
Contact friction coefficient — Коэффициент трения
0.5
Коэффициент трения Кулона между поясом и поверхностью шкива.
Wrap angle — Угол контакта пояса к шкиву
180 deg (значение по умолчанию) | положительная скалярная величина
Радиальный угол контакта между поясом и шкивом.
Velocity threshold — Скоростной порог
0.001 n/s (значение по умолчанию) | положительная скалярная величина
Относительная скорость требуется для пикового кинетического трения в контакте. Скоростной порог трения улучшает числовую устойчивость симуляции путем гарантирования, что сила непрерывна, когда направление скорости изменяется.
Больше о
развернуть все
Аппаратно-программное моделирование
Для оптимальной эффективности симуляции, набор > параметр к Do not model centrifugal force - Suitable for HIL simulation.
Расширенные возможности
Генерация кода C/C++
Генерация кода C и C++ с помощью Simulink® Coder™.
Представленный в R2012a