

Система механической передачи с тугим поясом, соединяющим два шкива
Simscape / Автомобильная трансмиссия / Couplings & Drives

Блок Belt Drive представляет пару шкивов, соединенных с гибким идеальным, плоским, или V-образным поясом. Идеальный пояс не уменьшается относительно поверхностей шкива.
Модель составляет трение между гибким поясом и периферией шкива. Если сила трения не достаточна, чтобы управлять загрузкой, модель позволяет промах. Отношение между силами в трудных и свободных ветвях соответствует уравнению Эйлера. Модель составляет центробежную загрузку в гибком поясе, инерции шкива и подшипнике трения.
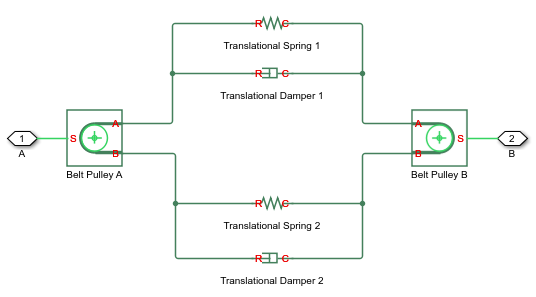
Блок Belt Drive является структурным компонентно-ориентированным на блоке Simscape™ Driveline™ Belt Pulley и Simscape блоки Translational Damper и Translational Spring. Translational Spring и блоки Translational Damper моделируют податливость пояса. Для уравнений, управляющих динамикой контакта между поясом и шкивом, смотрите блок Belt Pulley. Рисунок показывает блок-схему для блока Belt Drive.
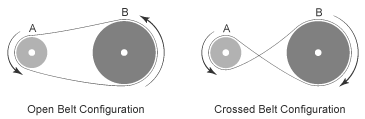
Схемы показывают открытые и пересеченные настройки ременного привода. В открытой настройке пояса оба шкива имеют тенденцию вращаться в том же направлении, и более крупный шкив имеет больший пояс, переносят угол. В пересеченной настройке пояса шкивы имеют тенденцию вращаться в противоположных направлениях и иметь то же самое, переносят угол.
Схемы ременного привода
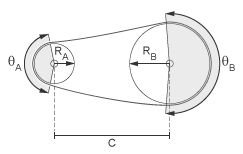
В открытой настройке угол переноса пояса вокруг каждого шкива дан выражениями:
где:
θA является углом переноса шкива A.
θB является углом переноса шкива B.
RA является эффективным радиусом шкива A.
RB является эффективным радиусом шкива B.
C является расстоянием между центрами шкивов A и B.
Схема показывает, что открытая настройка переносит углы и параметры.
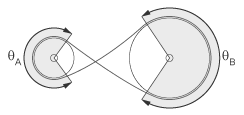
В пересеченной настройке переносятся эти два, углы равны, и угол переноса пояса вокруг каждого шкива
Схема показывает, что закрытая настройка переносит углы и параметры.
Шкивы не переводят.
Коэффициент трения и скоростной порог трения между поясом и каждым из шкивов являются тем же самым.