

Механизм механизма, который позволяет управляемым валам вращаться на различных скоростях
Simscape / Автомобильная трансмиссия / Механизмы

Блок Differential представляет механизм механизма, который позволяет управляемым валам вращаться на различных скоростях. Дифференциалы распространены в автомобилях, где они позволяют различным колесам вращаться на различных скоростях при движении на повороте. Порты D, S1 и S2 представляют продольное управление и солнце управляемые валы механизма дифференциала. Любой из валов может управлять другими двумя.
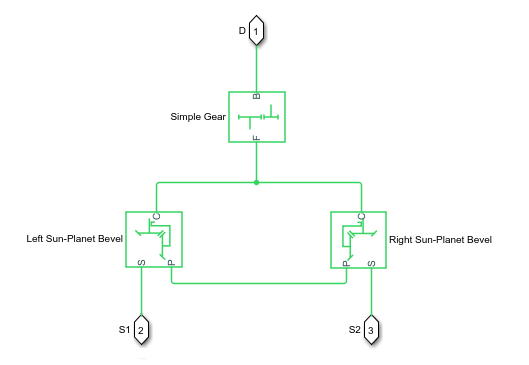
Блок моделирует дифференциальный механизм как структурное компонентно-ориентированное на Simple Gear и блоках Simscape™ Driveline™ Sun-Planet Bevel. Рисунок показывает эквивалентную схему для блока.
Чтобы увеличить точность модели механизма, задайте свойства, такие как инерция механизма, запутывающие потери и вязкие потери. По умолчанию инерция механизма и вязкие потери приняты незначительные. Блок позволяет вам задать инерцию поставщика услуг механизма и внутренних механизмов планеты только. Чтобы смоделировать инерцию внешних механизмов, соедините Simscape блоки Inertia с портами D, S1 и S2.
Можно смоделировать эффекты теплового потока и изменения температуры путем осушения дополнительного теплового порта. Чтобы осушить порт, во вкладке Meshing Losses, устанавливают параметр Friction model на Temperature-dependent efficiency.
Дифференциал налагает одно кинематическое ограничение на три связанных оси, таким образом что
где:
ωS1 является скоростью управляемого вала механизма солнца 1.
ωS2 является скоростью управляемого вала механизма солнца 2.
с верхним (+) или ниже (–) знак, допустимый для дифференциальной короны направо или оставленный, соответственно, средней линии. Эти три степени свободы уменьшают до двух независимых степеней свободы. Пары механизма (1,2) = (S, S) и (C, D). C является поставщиком услуг.
Сумма боковых движений является преобразованным продольным движением. Различие движений стороны, , независимо от продольного движения. Общее движение боковых валов является суперпозицией этих двух независимых степеней свободы, которые имеют это физическое значение:
Одна (продольная) степень свободы эквивалентна двум боковым валам, вращающимся при той же скорости вращения, , и в фиксированном отношении относительно продольного вала.
Другая степень свободы (дифференциал) эквивалентна хранению продольного ведущего заблокированного вала, , где ωD является скоростью ведущего вала, в то время как боковые валы вращаются друг относительно друга в противоположных направлениях, .
Крутящие моменты вдоль боковых осей ограничиваются к продольному крутящему моменту, таким образом, что потоки энергии в и из механизма, меньшего количества любых потерь мощности, суммируют, чтобы обнулить:
где:
τS1 и τS2 являются крутящими моментами вдоль боковых осей.
τD является продольным крутящим моментом.
Ploss является потерями мощности.
Когда кинематические ограничения и ограничения степени объединены, идеальные выражения случая
где gD является передаточным отношением для продольного ведущего вала.
Эффективное дифференциальное ограничение состоит из двух подограничений Механизма скоса планеты солнца.
Первое подограничение происходит из-за от связи двух скосов планеты солнца, связывает с поставщиком услуг:
где gSP1 и gSP2 являются передаточными отношениями для планет солнца.
Второе подограничение происходит из-за связи поставщика услуг к продольному карданному валу:
Передаточные отношения планеты солнца базовых механизмов скоса планеты солнца, в терминах радиусов, r, механизмов солнца и планеты:
и
Блок Differential реализован с , отъезд gD, свободного настраивать.
В неидеальном случае, τloss ≠ 0. Для получения дополнительной информации смотрите Механизмы Модели с Потерями.
Механизмы приняты твердые.
Трение Кулона замедляет симуляцию. Для получения дополнительной информации смотрите, Настраивают Точность Модели.
Disk Friction Clutch | Simple Gear | Sun-Planet Bevel