

Двигатель внутреннего сгорания с дросселем и вращательной инерцией и задержкой
Simscape / Автомобильная трансмиссия / Механизмы

Блок Generic Engine представляет общий двигатель внутреннего сгорания. Типы Engine включают воспламенение искры и дизель. Степень скорости и параметризация крутящего момента скорости обеспечиваются. Вход физического сигнала дросселя задает нормированный крутящий момент механизма. Дополнительные динамические параметры включают инерцию коленчатого вала и задержку времени отклика. Уровень расхода топлива механизма выходов порта физического сигнала на основе выбора модели расхода топлива. Дополнительная скорость и проводит практику "красной черты", контроллеры предотвращают останов механизма и включают круиз-контроль.
По умолчанию модель Generic Engine использует запрограммированное отношение между крутящим моментом и скоростью, модулируемой сигналом дросселя.
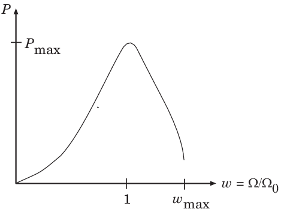
Модель механизма задана функцией спроса на мощность двигателя g (Ω). Функция обеспечивает максимальную мощность, доступную для данной скорости вращения двигателя Ω. Параметры блоков (максимальная мощность, скорость в максимальной мощности и максимальная скорость) нормируют эту функцию к физическому максимальному крутящему моменту и значениям скорости.
Нормированный входной сигнал дросселя T задает фактическую мощность двигателя. Степень поставляется как часть максимальной мощности, возможной в устойчивом состоянии при фиксированной скорости вращения двигателя. Это модулирует обеспеченную фактическую мощность, P, от механизма: P (Ω, T) = T · g (Ω). Крутящим моментом механизма является τ = P/Ω.
Мощность двигателя является ненулевой, когда скорость ограничивается рабочим диапазоном, Ωmin ≤ Ω ≤ Ωmax. Мощность двигателя абсолютного максимума Pmax задает Ω0, таким образом что Pmax = g (Ω0). Задайте w ≡ Ω/Ω0 и g (Ω) ≡ Pmax · p (w). Затем p (1) = 1 и dp (1)/dw = 0. Функция крутящего момента:
τ = (Pmax/Ω0) · [p (w)/w].
Можно вывести формы для p (w) из данных о механизме и моделей. Типовой Engine использует форму полинома третьего порядка:
p (w) = p1 · w + p2 · w 2 – p3 · w 3
удовлетворение
p1 + p2 – p3 = 1, p1 + 2p2 – 3p3 = 0.
В типичных механизмах pi положителен. Этот полином имеет три нуля, один в w = 0, и сопряженная пара. Одна из пары является положительной и физической; другой является отрицательным и нефизическим:
Типичная функция спроса на мощность двигателя
Для полинома мощности двигателя существуют ограничения, как показано, на полиномиальных коэффициентах p i, чтобы достигнуть допустимой кривой скорости степени.
Если вы используете сведенную в таблицу степень или закручиваете данные, соответствующие ограничения на P (Ω) остаются.
Задайте скорость и степень как w = Ω/Ω0 и p = P (Ω)/P0 и задайте контуры как wmin = Ωmin/Ω0 и wmax = Ωmax/Ω0. То:
Скорость вращения двигателя ограничивается положительной областью значений выше минимальной скорости и ниже максимальной скорости: 0 ≤ wmin ≤ w ≤ wmax.
Мощность двигателя на минимальной скорости должна быть неотрицательной: p (wmin) ≥ 0. Если вы используете полиномиальную форму, этим условием является ограничение на p i:
p (wmin) = p1 · wmin + p2 · w 2 min – p3 · wmin 3 ≥ 0.
Мощность двигателя на максимальной скорости должна быть неотрицательной: p (wmax) ≥ 0. Если вы используете полиномиальную форму, этим условием является ограничение на wmax: wmax ≤ w+.
Для параметризации по умолчанию блок обеспечивает два варианта типов двигателя внутреннего сгорания, каждого различными параметрами спроса на мощность двигателя.
| Потребление энергии Коэффициент | Тип Engine: | |
|---|---|---|
| Воспламенение Spark | Дизель | |
| p1 | 1 | 0.6526 |
| p2 | 1 | 1.6948 |
| p3 | 1 | 1.3474 |
Контроллер скорости холостого хода настраивает сигнал дросселя увеличить вращение механизма ниже задающей скорости согласно следующим выражениям:
и
где:
Π — Дроссель Engine
Πi — Введите дроссель (порт T)
Πc — Дроссель контроллера
ω — Скорость вращения двигателя
ωr — Ссылка скорости холостого хода
ωt — Порог скорости контроллера
τ — Постоянная времени контроллера
Управляемый дроссель увеличивается с задержкой первого порядка от нуля до того, когда скорость вращения двигателя падает ниже задающей скорости. Когда скорость вращения двигателя повышается выше задающей скорости, управляемый дроссель уменьшается от одного, чтобы обнулить. Когда различие между скоростью механизма и задающей скоростью меньше, чем порог скорости контроллера, функция tanh сглаживает производную времени управляемого дросселя. Управляемый дроссель ограничивается областью значений 0–1. Механизм использует больший из входа и управляемых значений дросселя. Если задержка механизма включена, контроллер изменяет вход, прежде чем задержка будет вычислена.
В то время как контроллер скорости холостого хода определяет минимальное значение дросселя для поддержания скорости вращения двигателя, проводить практику "красной черты" контроллер предотвращает повышенную скорость на основе максимального входа дросселя. Чтобы определить максимальное значение дросселя, проводить практику "красной черты" диспетчер использует уравнение моделей контроллеров скорости холостого хода. Однако для проводить практику "красной черты" контроллера:
ωr является проводить практику "красной черты" ссылкой скорости.
ωt является проводить практику "красной черты" порогом скорости.
τ является проводить практику "красной черты" постоянной времени.
Чтобы увеличить скорость симуляции, используйте опцию по умолчанию, No fuel consumption, для параметра Fuel consumption model.
Если вы выбираете какую-либо другую опцию для Fuel consumption model, блок решает нелинейное уравнение, которое требуется для вычисления расхода топлива. Блок решает уравнение, даже если порт FC, который сообщает об уровне расхода топлива, не соединяется с другим блоком.
Когда параметр устанавливается на No fuel consumption, блок не вычисляет расход топлива, даже если порт FC соединяется с другим блоком.
Этот блок содержит ограничение задержки механизма.
Механизмы отстают в их ответе на изменяющуюся скорость и дроссель. Блок опционально поддерживает задержку из-за изменяющегося дросселя только. Симуляция задержки увеличивает точность модели, но уменьшает эффективность симуляции.
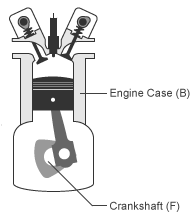
| Порт | Описание |
|---|---|
| B | Вращательный порт сохранения, представляющий блок двигателя |
| F | Вращательный порт Conserving, представляющий коленчатый вал механизма |
| T | Входной порт физического сигнала, задающий нормированный механизм, регулирует уровень |
| P | Выходной порт физического сигнала, сообщая о мгновенной мощности двигателя, в W |
| FC | Выходной порт физического сигнала, сообщая об уровне расхода топлива, в kg/s |
Порт T принимает сигнал со значениями в области значений 0–1. Сигнал задает крутящий момент механизма как часть максимального крутящего момента, возможного в устойчивом состоянии при фиксированной скорости вращения двигателя. Сигнал насыщает в нуле и один. Значения, ниже нуля, интерпретированы как нуль. Значения выше каждый интерпретирован как один.
Порт FC не делает выходных данных, когда параметр Fuel consumption model устанавливается на No fuel consumption.
Таблица показывает, как видимость некоторых параметров зависит от опции, которую вы выбираете для других параметров. Чтобы изучить, как считать таблицу, смотрите Зависимости от Параметра.
Зависимости от параметра крутящего момента Engine
| Engine Torque | ||
|---|---|---|
Model parameterization — Выбирает | ||
| Нормированный полином 3-го порядка соответствующим к пиковой мощности | Сведенные в таблицу данные о крутящем моменте | Сведенные в таблицу данные о степени |
Тип Engine — Выбирает | Вектор скорости | |
Максимальная мощность | Вектор крутящего момента | |
Скорость в максимальной мощности | Метод интерполяции — Выбирает | |
Максимальная скорость | ||
Остановите скорость | ||
Выберите, как смоделировать механизм. Выберите между этими опциями, каждая из которых включают другие параметры:
Normalized 3rd-order polynomial matched to peak power — Параметризуйте механизм с функцией степени, которой управляют характеристики скорости и степень. Это - опция по умолчанию.
Tabulated torque data — Engine параметризован таблицей крутящего момента скорости, которую вы задаете.
Tabulated power data — Engine параметризован таблицей степени скорости, которую вы задаете.
Выберите тип двигателя внутреннего сгорания. Выберите между Spark-ignition, опция по умолчанию и Diesel.
Выбор Normalized 3rd-order polynomial matched to peak power для Model parameterization параметр отсоединяет этот параметр.
Для получения дополнительной информации см. таблицу Engine Torque Parameter Dependencies.
Pmax максимальной мощности, который может вывести механизм. Значением по умолчанию является 150
kW.
Выбор Normalized 3rd-order polynomial matched to peak power для Model parameterization параметр отсоединяет этот параметр.
Для получения дополнительной информации см. таблицу Engine Torque Parameter Dependencies.
Ω0 скорости вращения двигателя, в котором механизм запускается в максимальной мощности. Значением по умолчанию является 4500
rpm.
Выбор Normalized 3rd-order polynomial matched to peak power для Model parameterization параметр отсоединяет этот параметр.
Для получения дополнительной информации см. таблицу Engine Torque Parameter Dependencies.
Ωmax максимальной скорости, в котором механизм может сгенерировать крутящий момент. Значением по умолчанию является 6000
rpm.
В процессе моделирования, если Ω превышает этот максимум, остановки симуляции с ошибкой. Ωmax максимальной скорости механизма не может превысить скорость вращения двигателя, при которой мощность двигателя становится отрицательной.
Выбор Normalized 3rd-order polynomial matched to peak power для Model parameterization параметр отсоединяет этот параметр.
Для получения дополнительной информации см. таблицу Engine Torque Parameter Dependencies.
Минимальный Ωmin скорости, в котором механизм может сгенерировать крутящий момент. Значением по умолчанию является 500
rpm.
В процессе моделирования, если Ω падает ниже этого минимума, крутящий момент механизма смешивается, чтобы обнулить.
Выбор Normalized 3rd-order polynomial matched to peak power для Model parameterization параметр отсоединяет этот параметр.
Для получения дополнительной информации см. таблицу Engine Torque Parameter Dependencies.
Вектор из значений независимой переменной функции механизма, скорость Ω. Значением по умолчанию является [500, 1000, 2000, 3000, 4000, 5000, 6000, 7000]
rpm.
Первые и последние скорости в векторе интерпретированы как скорость останова и максимальная скорость, соответственно. Если скорость падает ниже скорости останова, крутящий момент механизма смешивается, чтобы обнулить. Если скорость превышает максимальную скорость, остановки симуляции с ошибкой.
Выбор Tabulated torque data или Tabulated power data для Model parameterization параметр отсоединяет этот параметр.
Для получения дополнительной информации см. таблицу Engine Torque Parameter Dependencies.
Вектор из значений зависимой переменной функции механизма, крутящий момент τ. Значением по умолчанию является [380, 380, 380, 380, 350, 280, 200, 80]
N*m.
Выбор Tabulated torque data для Model parameterization параметр отсоединяет этот параметр.
Для получения дополнительной информации см. таблицу Engine Torque Parameter Dependencies.
Вектор из значений зависимой переменной функции механизма, степень P. Значением по умолчанию является [20, 40, 78, 120, 145, 148, 125, 60]
kW.
Выбор Tabulated power data для Model parameterization параметр отсоединяет этот параметр.
Для получения дополнительной информации см. таблицу Engine Torque Parameter Dependencies.
Метод, чтобы интерполировать крутящий момент скорости вращения двигателя или степень скорости функционирует между дискретными относительными скоростными значениями в области определения. Выберите между Linear, выбор по умолчанию и Smooth.
Выбор Tabulated torque data или Tabulated power data для Model parameterization параметр отсоединяет этот параметр.
Для получения дополнительной информации см. таблицу Engine Torque Parameter Dependencies.
Таблица показывает, как видимость некоторых параметров зависит от опции, которую вы выбираете для других параметров. Чтобы изучить, как считать таблицу, смотрите Зависимости от Параметра.
Зависимости от параметра динамики
| Dynamics | |
|---|---|
Инерция — выбирает | |
| Никакая инерция | Задайте инерцию и начальную скорость |
Инерция Engine | |
Начальная скорость | |
Постоянная времени — Выбирает | |
| Никакая задержка - Подходящий для Программно-аппаратной симуляции | Задайте постоянную времени и начальное значение |
Постоянная времени Engine | |
Начальная буква нормировала дроссель | |
Выберите, как смоделировать вращательную инерцию блока двигателя. Выберите между этими опциями, каждая из которых отсоединяет другие параметры:
No inertia — Коленчатый вал Engine моделируется без инерции. Эта опция является значением по умолчанию.
Specify inertia and initial velocity — Коленчатый вал Engine моделируется с вращательной инерцией и начальной скоростью вращения.
Вращательная инерция коленчатого вала механизма. Значением по умолчанию является 1
kg*m^2.
Выбор Specify inertia and initial velocity для Inertia параметр отсоединяет этот параметр.
Для получения дополнительной информации см. таблицу Dynamics Parameter Dependencies.
Начальная скорость вращения Ω (0) из коленчатого вала механизма. Значением по умолчанию является 800
rpm.
Выбор Specify inertia and initial velocity для Inertia параметр отсоединяет этот параметр.
Для получения дополнительной информации см. таблицу Dynamics Parameter Dependencies.
Выберите, как смоделировать задержку ответа механизма. Выберите между этими опциями, каждая из которых отсоединяет другие опции:
No lag — Suitable for HIL simulation — Engine реагирует без задержки. Эта опция является значением по умолчанию.
Specify time constant and initial value — Engine реагирует с задержкой.
Выбор Specify time constant and initial value отсоединяет другие параметры.
Для получения дополнительной информации см. таблицу Dynamics Parameter Dependencies.
Задержка Engine. Значением по умолчанию является 0.2
s.
Выбор Specify time constant and initial value для Time constant параметр отсоединяет этот параметр.
Для получения дополнительной информации см. таблицу Dynamics Parameter Dependencies.
Начальная буква нормировала дроссель механизма T (0), расположившись между нулем и один. Значением по умолчанию является 0.
Выбор Specify time constant and initial value для Time constant параметр отсоединяет этот параметр.
Для получения дополнительной информации см. таблицу Dynamics Parameter Dependencies.
Ширина скорости передвигается, по которому крутящий момент механизма смешивается, чтобы обнулить, когда Ω приближается к скорости останова. Значением по умолчанию является 100
rpm.
Таблица показывает, как видимость некоторых параметров зависит от опции, которую вы выбираете для других параметров. Чтобы изучить, как считать таблицу, смотрите Зависимости от Параметра.
Зависимости от параметра расхода топлива
| Fuel Consumption | ||||
|---|---|---|---|---|
Модель расхода топлива — Выбирает No fuel consumption, Constant per revolution, Fuel consumption by speed and torque, Brake specific fuel consumption by speed and torque, или Brake specific fuel consumption by speed and brake mean effective pressure | ||||
| Никакой расход топлива | Постоянный на оборот | Расход топлива скоростью и крутящим моментом | Тормозите определенный расход топлива скоростью и крутящим моментом | Тормозите определенный расход топлива скоростью, и тормоз означают эффективное давление |
Расход топлива на оборот | Перемещенный объем | |||
Обороты на цикл | ||||
Вектор скорости | ||||
Вектор крутящего момента | Тормозите средний эффективный вектор давления | |||
Таблица расхода топлива | Тормозите определенную таблицу расхода топлива | |||
Метод интерполяции — Выбирает | ||||
Выберите модель для вычисления расхода топлива механизма. Model parameterization совместимы со стандартными промышленными данными. Выберите между этими опциями:
No fuel consumption — Опция по умолчанию
Constant per revolution
Fuel consumption by speed and torque
Brake specific fuel consumption by speed and torque
Brake specific fuel consumption by speed and brake mean effective pressure
Некоторые опции отсоединяют другие параметры. Для получения дополнительной информации см. таблицу Fuel Consumption Parameter Dependencies.
Блок не вычисляет расход топлива, даже когда порт FC, который сообщает об уровне расхода топлива, соединяется с другим блоком. Выбор этой опции увеличивает скорость симуляции.
Введите объем топлива, использованного в одном обороте коленчатого вала. Значением по умолчанию является 25
mg/rev.
Выбор Constant per revolution для Fuel consumption model параметр отсоединяет этот параметр.
Для получения дополнительной информации см. таблицу Fuel Consumption Parameter Dependencies.
Введите объем, перемещенный ходом поршня. Значением по умолчанию является 400
cm^3.
Выбор Brake specific fuel consumption by speed and brake mean effective pressure для Fuel consumption model параметр отсоединяет этот параметр.
Для получения дополнительной информации см. таблицу Fuel Consumption Parameter Dependencies.
Введите номер оборотов коленчатого вала в одном цикле сгорания — например, 2 для четырехтактного механизма или 1 для двухтактного двигателя. Значением по умолчанию является 2.
Выбор Brake specific fuel consumption by speed and brake mean effective pressure для Fuel consumption model параметр отсоединяет этот параметр.
Для получения дополнительной информации см. таблицу Fuel Consumption Parameter Dependencies.
Введите вектор из скоростей вращения двигателя, используемых в параметризации интерполяционной таблицы. Размер вектора должен совпадать с Torque vector size. Значением по умолчанию является [1000, 2000, 3000, 4000, 5000, 6000]
rpm. Выбор Fuel consumption by speed and torque, Brake specific fuel consumption by speed and torque, или Brake specific fuel consumption by speed and brake mean effective pressure для Fuel consumption model параметр отсоединяет этот параметр.
Для получения дополнительной информации см. таблицу Fuel Consumption Parameter Dependencies.
Введите вектор из крутящих моментов механизма, используемых в параметризации интерполяционной таблицы. Размер вектора должен совпадать с размером Speed vector. Значением по умолчанию является [0, 80, 160, 200, 240, 320, 360, 400]
N*m. Выбор Fuel consumption by speed and torque или Brake specific fuel consumption by speed and torque для Fuel consumption model параметр отсоединяет этот параметр.
Для получения дополнительной информации см. таблицу Fuel Consumption Parameter Dependencies.
Введите матрицу с уровнями расхода топлива, соответствующими скорости вращения двигателя, и закрутите векторы. Количество строк должно равняться числу элементов в Speed vector. Количество столбцов должно равняться числу элементов в Torque vector. Значением по умолчанию является [.5, .9, 1.4, 1.6, 1.9, 2.7, 3.4, 4.4; 1, 1.7, 2.7, 3.1, 3.6, 5, 6, 7.4; 1.4, 2.7, 4, 4.8, 5.6, 7.5, 8.5, 10.5; 2, 3.6, 5.8, 6.7, 8, 10.4, 11.7, 13.3; 2.5, 4.8, 7.9, 9.4, 10.8, 14, 16.2, 18.6; 3.1, 6, 10.3, 11.9, 13.8, 18.4, 22, 26.5]
g/s.
Выбор Fuel consumption by speed and torque для Fuel consumption model параметр отсоединяет этот параметр.
Для получения дополнительной информации см. таблицу Fuel Consumption Parameter Dependencies.
Введите вектор из значений среднего значения тормоза эффективного давления (BMEP). Значением по умолчанию является [0, 250, 500, 625, 750, 1000, 1150, 1250]
kPa. BMEP удовлетворяет выражению:
где:
T Выведите крутящий момент
nc — Количество циклов на оборот
Vd — Цилиндр переместил объем
Выбор Brake specific fuel consumption by speed and brake mean effective pressure для Fuel consumption model параметр отсоединяет этот параметр.
Для получения дополнительной информации см. таблицу Fuel Consumption Parameter Dependencies.
Выбор Brake specific fuel consumption by speed and torque или Brake specific fuel consumption by speed and brake mean effective pressure для Fuel consumption model параметр отсоединяет этот параметр.
Для получения дополнительной информации см. таблицу Fuel Consumption Parameter Dependencies.
Для Brake specific fuel consumption by speed and torque топливная модель, введите матрицу с уровнями тормоза определенного расхода топлива (BSFC), соответствующими скорости вращения двигателя, и закрутите векторы. BSFC является отношением уровня расхода топлива к выходной мощности. Количество строк должно равняться числу элементов в Speed vector. Количество столбцов должно равняться числу элементов в Torque vector.
Для Brake specific fuel consumption by speed and brake mean effective pressure топливная модель, введите матрицу с уровнями тормоза определенного расхода топлива (BSFC), соответствующими векторы среднего значения тормоза эффективного давления (BMEP) и скорость вращения двигателя. BSFC является отношением уровня расхода топлива к выходной мощности. Количество строк должно равняться числу элементов в Speed vector. Количество столбцов должно равняться числу элементов в Brake mean effective pressure vector.
Для обеих моделей расхода топлива значением по умолчанию является [410, 380, 300, 280, 270, 290, 320, 380; 410, 370, 290, 270, 260, 270, 285, 320; 415, 380, 290, 275, 265, 270, 270, 300; 420, 390, 310, 290, 285, 280, 280, 285; 430, 410, 340, 320, 310, 300, 310, 320; 450, 430, 370, 340, 330, 330, 350, 380]
g/hr/kW.
Выберите метод интерполяции, используемый, чтобы вычислить расход топлива в промежуточных значениях крутящего момента скорости. Методами является Linear и Smooth. Вне области значений данных расход топлива считается постоянный в последнем значении, данном в интерполяционной таблице. Выбор Fuel consumption by speed and torque, Brake specific fuel consumption by speed and torque, или Brake specific fuel consumption by speed and brake mean effective pressure для Fuel consumption model параметр отсоединяет этот параметр.
Для получения дополнительной информации см. таблицу Fuel Consumption Parameter Dependencies.
Таблица показывает, как видимость некоторых параметров зависит от опции, которую вы выбираете для других параметров. Чтобы изучить, как считать таблицу, смотрите Зависимости от Параметра.
Зависимости от параметра регулировки скорости
| Speed Control | |
|---|---|
Управление скоростью холостого хода — Выбирает | |
| Off | On |
Ссылка скорости холостого хода | |
Постоянная времени контроллера | |
Проведите практику "красной черты" управление | |
Проведите практику "красной черты" управление — Выбирает | |
| Off | On |
Проведите практику "красной черты" скорость | |
Проведите практику "красной черты" постоянная времени | |
Проведите практику "красной черты" пороговая скорость | |
Выберите модель регулировки скорости. Опции:
Off — Не используйте контроллер скорости холостого хода. Вход дросселя используется непосредственно. Эта опция является значением по умолчанию.
On — Включайте контроллер скорости холостого хода, чтобы предотвратить остановку механизма. Эта опция отсоединяет другие параметры. Для получения дополнительной информации смотрите Модели контроллеров Скорости холостого хода.
Введите значение ссылки скорости, ниже которой скорость увеличивается, и выше которого уменьшается скорость. Значением по умолчанию является 1000
rpm.
Выбор On для Idle speed control параметр отсоединяет этот параметр.
Для получения дополнительной информации см. таблицу Speed Control Parameter Dependencies.
Введите значение постоянной времени, сопоставленной с увеличением или уменьшением управляемого дросселя. Постоянное значение должно быть положительным. Значением по умолчанию является 1
s.
Выбор On для Idle speed control параметр отсоединяет этот параметр.
Для получения дополнительной информации см. таблицу Speed Control Parameter Dependencies.
Параметр раньше сглаживал управляемое значение дросселя, когда скорость вращения механизма пересекает ссылку скорости холостого хода. Для получения дополнительной информации смотрите Модели контроллеров Скорости холостого хода. Большие значения уменьшают скорость отклика контроллера. Маленькие значения увеличивают вычислительную стоимость. Этот параметр должен быть положительным. Значением по умолчанию является 1
rpm.
Выбор On для Idle speed control параметр отсоединяет этот параметр.
Для получения дополнительной информации см. таблицу Speed Control Parameter Dependencies.
Выбор проводит практику "красной черты" модель управления. Опции включают Off и On.
Off — Не используйте проводят практику "красной черты" контроллер. Дроссель зависит только от контроллера скорости холостого хода. Эта опция является значением по умолчанию.
On — Включайте проводят практику "красной черты" контроллер, чтобы предотвратить повышенную скорость. Эта опция отсоединяет другие параметры.
Для получения дополнительной информации см. таблицу Speed Control Parameter Dependencies.
Введите значение ссылки скорости, выше которой активируется проводить практику "красной черты" управление. Значением по умолчанию является 5000
rpm.
Выбор On для Redline control параметр отсоединяет этот параметр.
Для получения дополнительной информации см. таблицу Speed Control Parameter Dependencies.
Введите значение постоянной времени, сопоставленной с увеличением или уменьшением управляемого дросселя. Постоянное значение должно быть положительным. Значением по умолчанию является 1
s.
Выбор On для Redline control параметр отсоединяет этот параметр.
Для получения дополнительной информации см. таблицу Speed Control Parameter Dependencies.
Задайте ширину области вокруг проводить практику "красной черты" скорости, куда контроллер идет от полностью активированного к не включенный. Блок использует этот параметр для сглаживания управляемого значения дросселя, когда скорость вращения механизма пересекает проводить практику "красной черты" ссылку скорости. Большие значения уменьшают скорость отклика контроллера. Маленькие значения увеличивают вычислительную стоимость. Этот параметр должен быть положительным. Значением по умолчанию является 1
rpm.
Выбор On для Redline control параметр отсоединяет этот параметр.
Для получения дополнительной информации см. таблицу Speed Control Parameter Dependencies.
Для оптимальной эффективности симуляции, набор Dynamics> параметр Time Constant к No time constant - Suitable for HIL simulation.