

Кинематическое ограничение между началом системы координат и изогнутым контуром
Ограничения

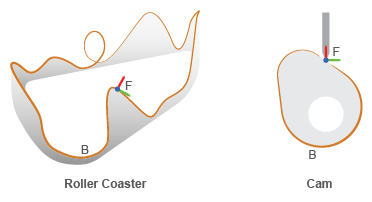
Этот блок представляет кинематическое ограничение между точкой и кривой. Ограничение позволяет системе координат последователя переводить только вдоль кривой, соединенной с основным портом геометрии. Система координат последователя свободна вращаться в зависимости от других ограничений в модели. Используйте этот блок для ограничений точки на кривой модели, таких как это между американскими горками и дорожкой или толкателем клапана и бегунком.
Примеры ограничений точки на кривой
Задайте ограничительную кривую путем соединения блока кривой с основным портом геометрии. Как лучшая практика, всегда используйте блок кривой в качестве части твердого тела, например, путем хранения его в подсистеме твердого тела. Это позволяет вам быстро переключиться, например, между различными бегунками или дорожками американских горок. Избегайте кривых с резкими изменениями в наклоне, когда они могут вызвать проблемы симуляции.
Выберите силу в ограничительной паре силы реакции действия, чтобы распознаться. Можно обнаружить силу, которую система координат последователя порождает на базисную кривую или наоборот. Настройкой по умолчанию является Follower on Base.
Выберите систему координат, чтобы разрешить ограничительное измерение силы в. Можно выбрать система координат последователя или основа. Настройкой по умолчанию является Base.
Установите флажок, чтобы обнаружить ограничительную силу. Блок отсоединяет выходной порт физического сигнала f, который выводит измерение силы как 3D вектор, [F x, F y, F z].
Блок содержит два порта:
Порт B — Geometry сопоставлен с ограничительной кривой (установленный путем соединения порта с блоком Spline).
Порт F — Frame сопоставлен с ограничительной точкой (заданный как источник системы координат).
Дополнительный порт появляется, когда вы выбираете ограничительное обнаружение силы:
f Физический сигнал с ограничением обеспечивает компоненты [F x, F y, F z]
Angle Constraint | Bevel Gear Constraint | Common Gear Constraint | Distance Constraint | Rack and Pinion Constraint | Spline