В этом примере показано, как создать систему, которая моделирует колесо, катящееся по наклонной плоскости при помощи блока Spatial Contact Force.
Создать новую модель Simscape™ Multibody™, в командной строке MATLAB®, введите:
smnew % create new Simscape Multibody model
В модели добавьте:
Блок Rigid Transform
Один блок 6-DOF Joint
Один блок Cylindrical Solid
Один блок Spatial Contact Force
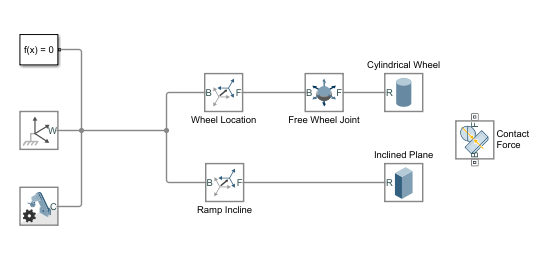
Удалите Scope, PS-Simulink Converter и блоки Simulink-PS Converter. Переименуйте и соедините блоки как показывающий на следующем рисунке.
Присвойте эти свойства Местоположению Колеса:
| Property | Значение |
|---|---|
| Rotation> Method | Aligned Axes |
| Rotation> Pair 1> Follower | +Z |
| Rotation> Pair 1> Base | -Y |
| Rotation> Pair 2> Follower | +X |
| Rotation> Pair 2> Base | +X |
| Translation> Method | None |
Присвойте эти свойства Сползать Наклонная поверхность:
| Property | Значение |
|---|---|
| Rotation> Method | Standard Axis |
| Rotation> Axis | +Y |
| Rotation> Angle | 5 deg |
| Translation> Method | Cartesian |
| Translation> Offset | [30 0 -15] cm |
Присвойте эти свойства Цилиндрическому Колесу:
| Property | Значение |
|---|---|
| Geometry> Radius | 5 cm |
| Geometry> Length | 4 cm |
| Geometry> Export> Entire Geometry | selected |
| Inertia> Type | Calculate from Geometry |
| Inertia> Based on | Density |
| Inertia> Density | 650 kg/m^3 |
| Graphic> Type | From Geometry |
| Graphic> Visual Properties | Simple |
| Graphic> Visual Properties> Color | [0.6 0.0 0.0] |
| Graphic> Visual Properties> Opacity | 1.0 |
| Frames> Show Port R | selected |
Присвойте эти свойства Inclined Plane:
| Property | Значение |
|---|---|
| Geometry> Dimensions | [90 20 5] cm |
| Geometry> Export> Entire Geometry | selected |
| Inertia> Type | Calculate from Geometry |
| Inertia> Based on | Density |
| Inertia> Density | 1000 kg/m^3 |
| Graphic> Type | From Geometry |
| Graphic> Visual Properties | Simple |
| Graphic> Visual Properties> Color | [0.4196 0.5569 0.1373] |
| Graphic> Visual Properties> Opacity | 1.0 |
| Frames> Show Port R | selected |
Присвойте эти свойства Силе контакта:
| Property | Значение |
|---|---|
| Normal Force> Stiffness | 1e6 N/m |
| Normal Force> Damping | 1e3 N/(m/s) |
| Normal Force> Normal Force: Transition Region Width | 1e-4 m |
| Frictional Force> Method | Smooth Stick-Slip |
| Frictional Force> Coefficient of Static Friction | 0.3 |
| Frictional Force> Coefficient of Dynamic Friction | 0.3 |
| Frictional Force> Critical Velocity | 0.01 m/s |
| Sensing> Separation Distance | unselected |
| Sensing> Normal Force | unselected |
| Sensing> Frictional Force Magnitude | unselected |
На вкладке Modeling выберите Model Settings> Model Settings, чтобы открыть Параметры конфигурации. В панели Решателя, под Solver details, обновляют следующее:
| Max step size: | 1e-3 |
| Absolute tolerance: | 1e-3 |
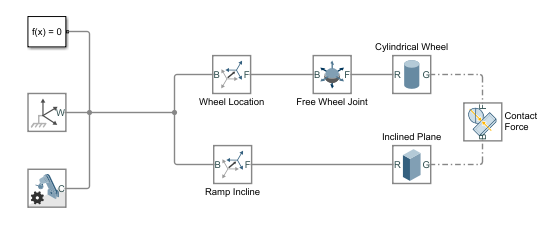
На данном этапе и блок Cylindrical Wheel и блок Inclined Plane должны иметь порт геометрии. Как показано на рисунке, соедините порты геометрии Наклонной плоскости и Цилиндрических блоков Колеса к основе и порты последователя блока Spatial Contact Force, соответственно.
На вкладке Simulation нажмите Run. В окне MATLAB открывается панель Mechanics Explorer, и вы видите, что цилиндрическое колесо катится по поверхности.
Процесс моделирования, описанный выше, может использоваться, чтобы разработать более сложные модели, которые включают силы контакта. Видеть более сложную модель, в командной строке MATLAB, введите:
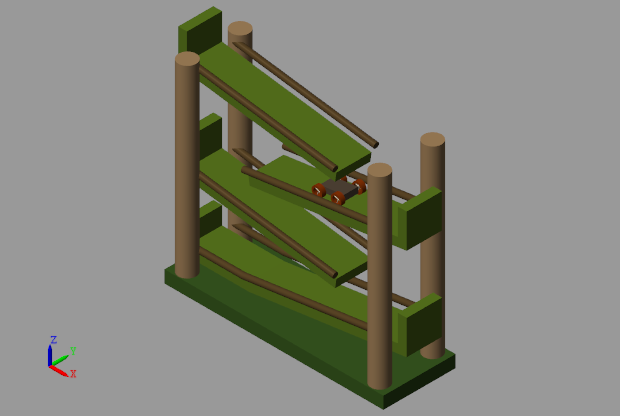
sm_bumper_car % open Simscape Multibody bumper car model
Открытый Bumper Car Playset.
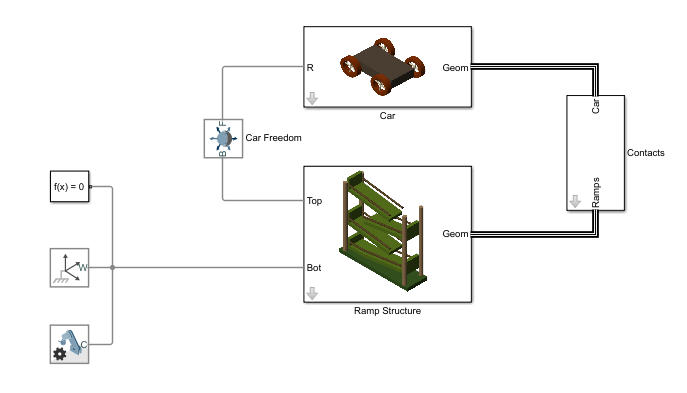
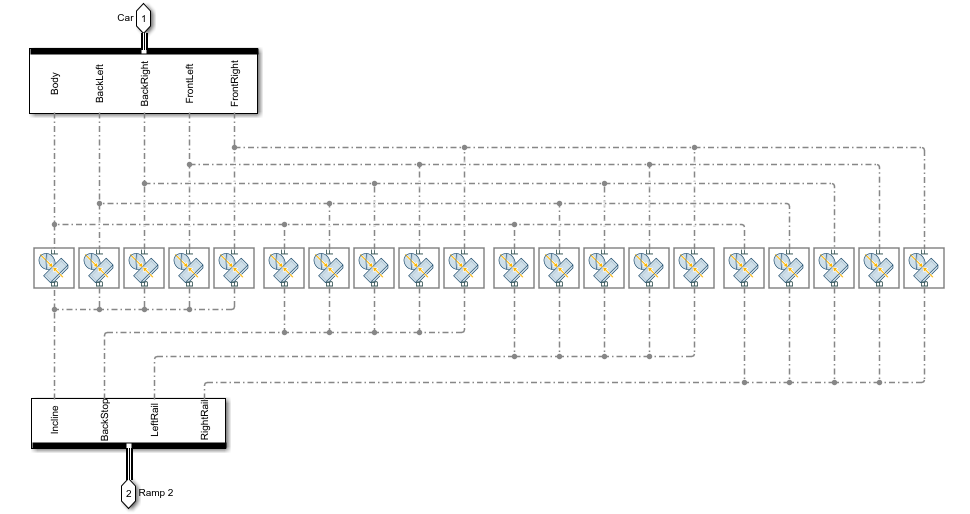
Модель сделана из двух структур: Автомобиль и Структура Пандуса. Блоки Spatial Contact Force, которые используются, чтобы смоделировать силы контакта между каждым колесом автомобиля и пандусами, помещены в корпус в Car to Ramp подсистемы.
Чтобы симулировать модель, во вкладке Simulation, нажимают Run. В Mechanics Explorer вы видите, что автомобиль бампера катится по нескольким пандусам.