

Блоки механизма повсеместны во вращающемся машинном оборудовании. Они появляются в связях и дисках, часто как зубчатые передачи, куда они передают крутящий момент в отношении или под углом между движущимися контактирующими телами. Некоторые, как блоки реечного механизма, служат особому назначению, такому как преобразование между вращательными и поступательными движениями.
Механизмы в автомобильном дифференциале
Кинематика механизмов в mesh является результатом того, что, в вычислительных терминах, алгебраических ограничениях между вращениями механизма. Зубы механизма не могут физически перекрыться, и механизмы, в контактной точке, известной как точку подачи, должны переместиться с той же мгновенной линейной скоростью.
Ограничительные блоки механизма получают эффекты этих ограничений в модели. Блоки, найденные в библиотеке Gears and Couplings> Gears, включают:
Bevel Gear Constraint — Свяжите два механизма, обычно конические в поперечном сечении, с пересекающаяся осями вращения, встречающимися под правильным или общим углом. Конические блоки механизма распространены в ходовых частях винтокрыла, куда они передают крутящий момент между валами ротора, смонтированными под углом.
Common Gear Constraint — Свяжите два механизма, обычно цилиндрические в поперечном сечении, с внутренними или внешними запутывающими и параллельными осями вращения. Общие блоки механизма появляются в автомобильных передачах, часто как планетарные зубчатые передачи, та степень передачи с механизма на колеса в предварительно установленных отношениях крутящего момента.
Rack and Pinion Constraint — Свяжите вращающуюся шестерню со стойкой перевода с соответствующим направлением осей движения под прямым углом. Блоки реечного механизма распространены в системах рулевого управления с усилителем, где они преобразовывают вращение руля в перевод стержней связи, заставляя держащиеся руки и колеса поворачиваться.
Worm and Gear Constraint — Свяжите червя и механизм с непересекающимся направлением осей вращения под прямым углом. Блоки червя-и-механизма формируются, основа убила диски, встроенные в солнечные средства отслеживания, которые спроектированы, чтобы следовать за солнцем и максимизировать интенсивность солнечного света, ударяющего массив солнечной батареи.
С топологической точки зрения форма блоков механизма закрыла кинематические цепи или циклы. Простой цикл включает два или больше механизма — термин, использованный свободно здесь, чтобы включать червей, шестерни, и стойки — и фиксатор, чтобы содержать механизмы. Механизмы соединяются на одном конце фиксатору через соединения, и на другом конце друг другу посредством ограничения механизма.
Простой механизм кинематическая цепь
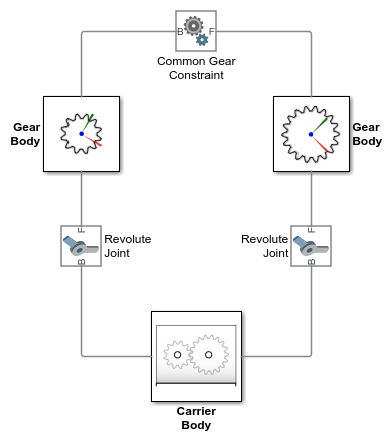
Соединения задают степени свободы, доступные для механизмов, прежде чем они будут принесены в mesh. Степени свободы кодируют типы движения, механизмы способны к и соответствующие оси движения. Ограничение механизма связывает механизмы так, чтобы они переместились, как будто в mesh в отношении скорости, определенном из механизма (подача), радиусы или зуб рассчитывают.
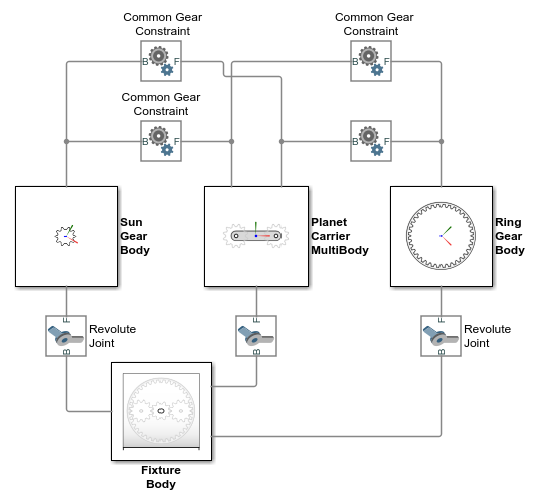
Топология более сложной модели возможна. В планетарной зубчатой передаче кольцевой механизм добавляет вторую кинематическую замкнутую цепь в модель. Механизмы планеты, присоединенные к поставщику услуг, добавляют еще больше кинематических замкнутых цепей. Однако, неважно, как уникальный блок механизма, модель должна по ее характеру включать по крайней мере одну кинематическую замкнутую цепь.
Планетарные кинематические замкнутые цепи механизма
Ограничения механизма вводят специальные ограничения для положений и ориентаций систем координат связи механизма. Эти ограничения в дополнение к запутывающему ограничению, которое связывает движения механизмов о соответствующих осях вращения, и служите, чтобы гарантировать, что механизмы всегда располагаются в mesh. Например, блок Common Gear Constraint требует что:
Расстояние между z - оси быть равным расстоянию между центрами механизма.
Система координат последователя лежит на плоскости xy базовой системы координат.
z - оси базы и последующей системы координат указывают в том же направлении.
Ограничительные блоки механизма осуществляют ограничения блока, но во время сборки блока только, когда механизмы являются занявшими первое место в mesh. Если симуляция запускается, это - задача модели гарантировать, что размещение механизма все еще удовлетворяет требованиям блока. Ограничительные блоки механизма затем осуществляют запутывающее ограничение, но просто контролируют ограничения блока, чтобы гарантировать, что механизмы остаются в допустимой настройке.
Для примеров, показывающих, как правильно поместить системы координат связи механизма с помощью блоков Rigid Transform, см.:
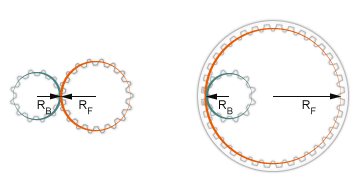
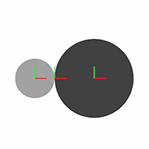
Ограничения механизма параметрируются в терминах размерностей круга подачи. Круг подачи является мнимым кругом, концентрическим с механизмом или червем и касательной к зубной контактной точке. У каждого механизма и червя есть круг подачи. Рисунок показывает круги подачи цилиндрических механизмов с внешним и запутывающим внутренним. Параметры R B и R F обозначают радиусы подачи механизма.
Можно аппроксимировать механизмы, червей и стойки с помощью стандартных твердых форм. Используйте цилиндры с радиусами, равными радиусам подачи для механизмов и червей. Можно использовать конусы для конических механизмов и кирпичи для форм стойки. Рисунок показывает пример с цилиндрическими конфигурациями механизма, уменьшаемыми до цилиндров. Если вы плохо знакомы с моделированием тел с помощью стандартных твердых форм, см. Модель Простое звено.
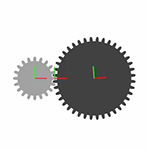
Для более подробных конфигураций используйте блок Extruded Solid. Эта форма позволяет вам задать имеющие зубы перекрестные частные формы механизмов и стоек. Блок Extruded Solid генерирует 3-D экструзии путем развертки поперечных сечений вдоль их нормальных осей. Рисунок показывает пример с цилиндрическими конфигурациями механизма, смоделированными как общие экструзии. Для примера, показывающего, как смоделировать простое тело с блоком Extruded Solid, смотрите Экструзии Моделирования и Обороты.
Для точных конфигураций можно загрузить 3-D формы в блоки File Solid с помощью файлов STL или ШАГА. Необходимо получить ШАГ или файлы STL из внешних источников. Если у вас есть Модели CAD механизмов, червей и стоек, можно смочь экспортировать их на ШАГЕ или формате STL для использования в программном обеспечении Simscape™ Multibody™. Рисунок показывает пример с цилиндрическими конфигурациями механизма, импортированными из Моделей CAD через файлы ШАГА.

Физические модели, предоставленные ограничительными блоками механизма, идеализированы. Трение механизма, инерция и обратная реакция проигнорированы. Вы добавляете вязкое затухание в валы механизма путем определения коэффициентов демпфирования в блоках соединений, которые представляют соединения вала. Блоки соединений вала обычно располагаются между корпусами вала механизма и телом поставщика услуг механизма. Вы добавляете инерцию в механизмы путем моделирования зубчатых тел с помощью различных твердых блоков, Inertia или блоков General Variable Mass.