В этом примере вы предписываете изменяющийся во времени угол заводной рукоятки четырёхзвенника с помощью блока Revolute Joint. Затем в процессе моделирования вы обнаруживаете крутящий момент приведения в действие в том же соединении, соответствующем предписанному движению.
В командной строке MATLAB® введите smdoc_four_bar. Модель четырёхзвенника открывается. Это - модель, которую вы создаете в примере, Моделируют Кинематическую Цепь С обратной связью.
В диалоговом окне блока Base-Crank Revolute Joint задайте следующие настройки параметров.
| Параметр | Установка |
|---|---|
| Actuation> Torque | Automatically Computed |
| Actuation> Motion | Provided by Input |
| Sensing> Actuator Torque | Выбранный |
Блок соединений отображает два порта физического сигнала. Input port q принимает объединенное угловое положение. Выходной порт t обеспечивает объединенный крутящий момент приведения в действие, требуемый достигнуть того углового положения.
В каждом из этих четырех диалоговых окон блока Revolute Joint, набор Internal Mechanics> Damping Coefficient к 5e-4
N*m/(deg/s). В процессе моделирования затухание сил между соединением структурирует счет на диссипативные потери в соединениях.
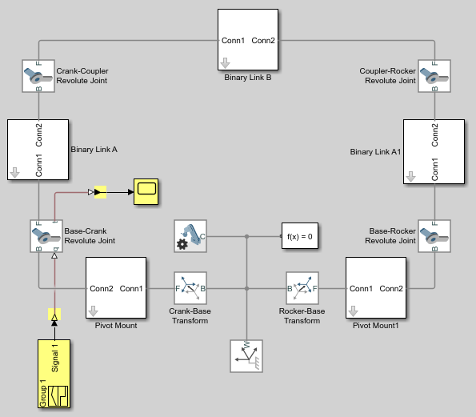
Перетащите следующие блоки в модель. Эти блоки позволяют вам указать, что крутящий момент приведения в действие сигнализирует и строит объединенное положение.
| Блок | Библиотека |
|---|---|
| Simulink-PS Converter | Simscape> Utilities |
| PS-Simulink Converter | Simscape> Utilities |
| Scope | Simulink> Sinks |
| Signal Builder | Simulink> Sources |
Соедините блоки как показано на рисунке.
Во вкладке Input Handling диалогового окна блока Simulink-PS Converter задайте следующие параметры блоков.
| Параметр | Значение |
|---|---|
| Filtering and derivatives | Filter input |
| Input filtering order | Second-order filtering |
В окне Signal Builder задайте объединенную угловую траекторию как показано на рисунке.
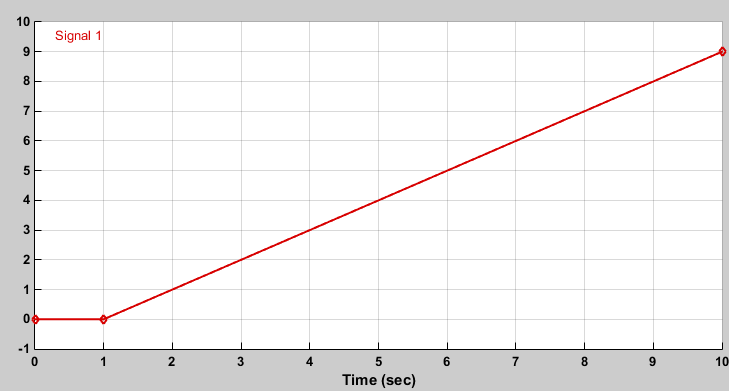
Этот сигнал соответствует постоянной угловой скорости 1 рад/с от t = 1 с вперед.
Запустите симуляцию. Mechanics Explorer открывается динамическим отображением модели четырёхзвенника.
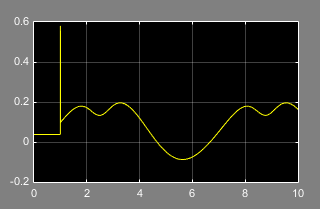
Откройте окно Scope. График осциллографа показывает объединенный крутящий момент приведения в действие, с которым можно достигнуть движения, которое вы предписали.