FOC асинхронной машины дискретного времени на модуль
Simscape / Электрический / Управление / Управление Асинхронной машиной

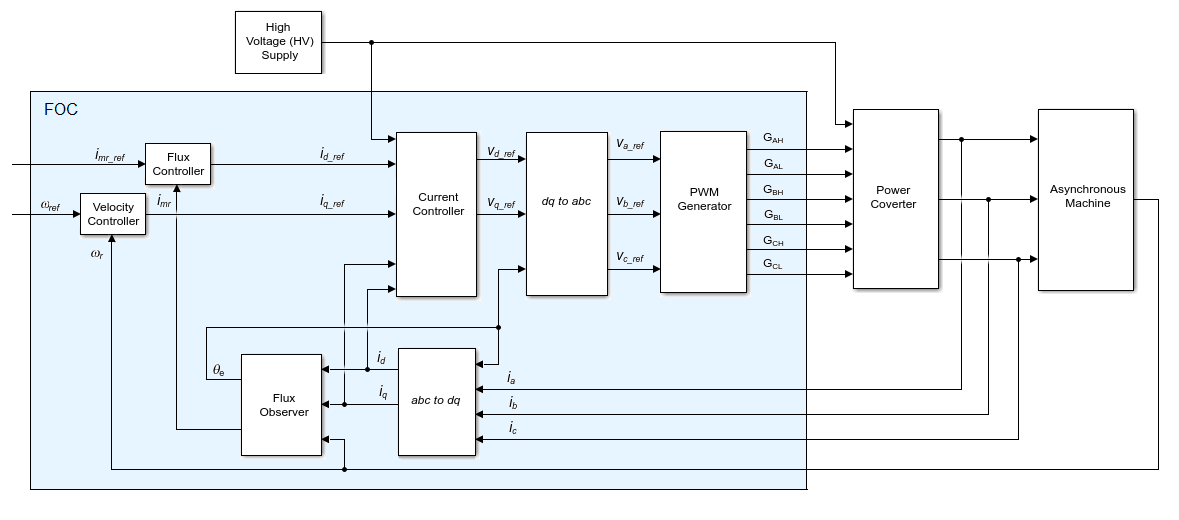
Блок Induction Machine Field-Oriented Controller реализует структуру ориентированного на поле управления (FOC) асинхронной машины с помощью системы на модуль. Чтобы разъединить крутящий момент и поток, FOC использует ротор d-q система координат. Рисунок показывает управляющую структуру.
В схеме:
ωr является измеренной скоростью вращения.
ωref является ссылочной скоростью вращения.
id и iq является d - и q - токи статора оси.
ia, ib и ic является a - b - и c - статор фазы извилистые токи.
imr_ref является ссылкой, намагничивающей текущий.
imr является текущим намагничиванием.
vd и vq является d - и q - напряжения статора оси.
va, vb и vc является a - b - и c - статор фазы извилистые напряжения.
θe является ротором электрический угол.
GAH, GAL, GBH, GBL, GCH и GCL является a - b - и c - фаза, высокая (H) и низкий (L) импульсы логического элемента.
Параметры машины известны.
Реализация использует систему на модуль.
Реализация управляющей структуры использует одну частоту дискретизации.

